黄金科学技术 ›› 2020, Vol. 28 ›› Issue (1): 105-111.doi: 10.11872/j.issn.1005-2518.2020.01.043
毕林1,2( ),段长铭1,2(),任助理1,2
),段长铭1,2(),任助理1,2
Lin BI1,2(),Changming DUAN1,2(),Zhuli REN1,2
摘要:
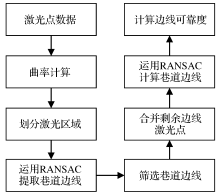
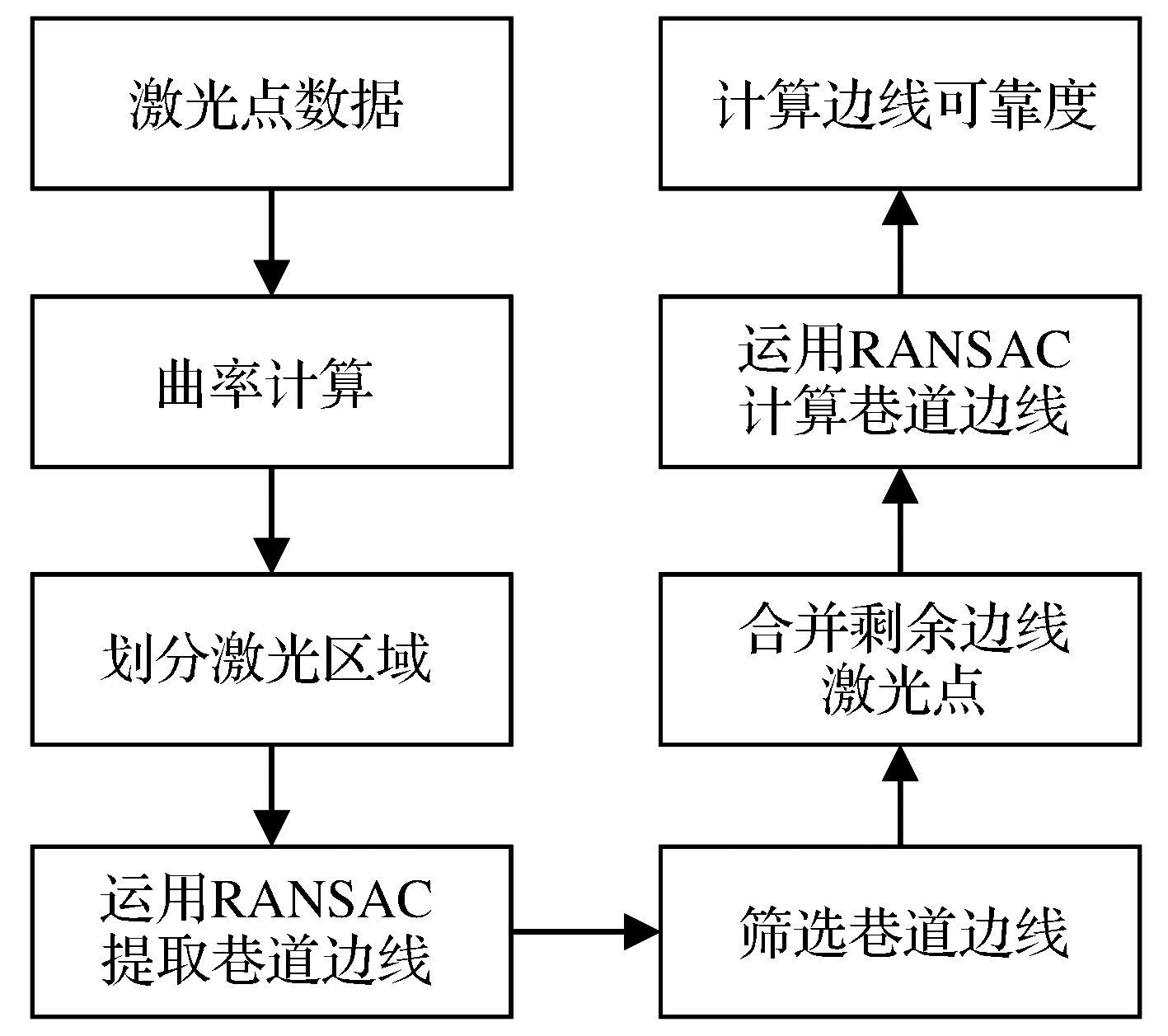
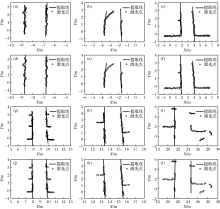
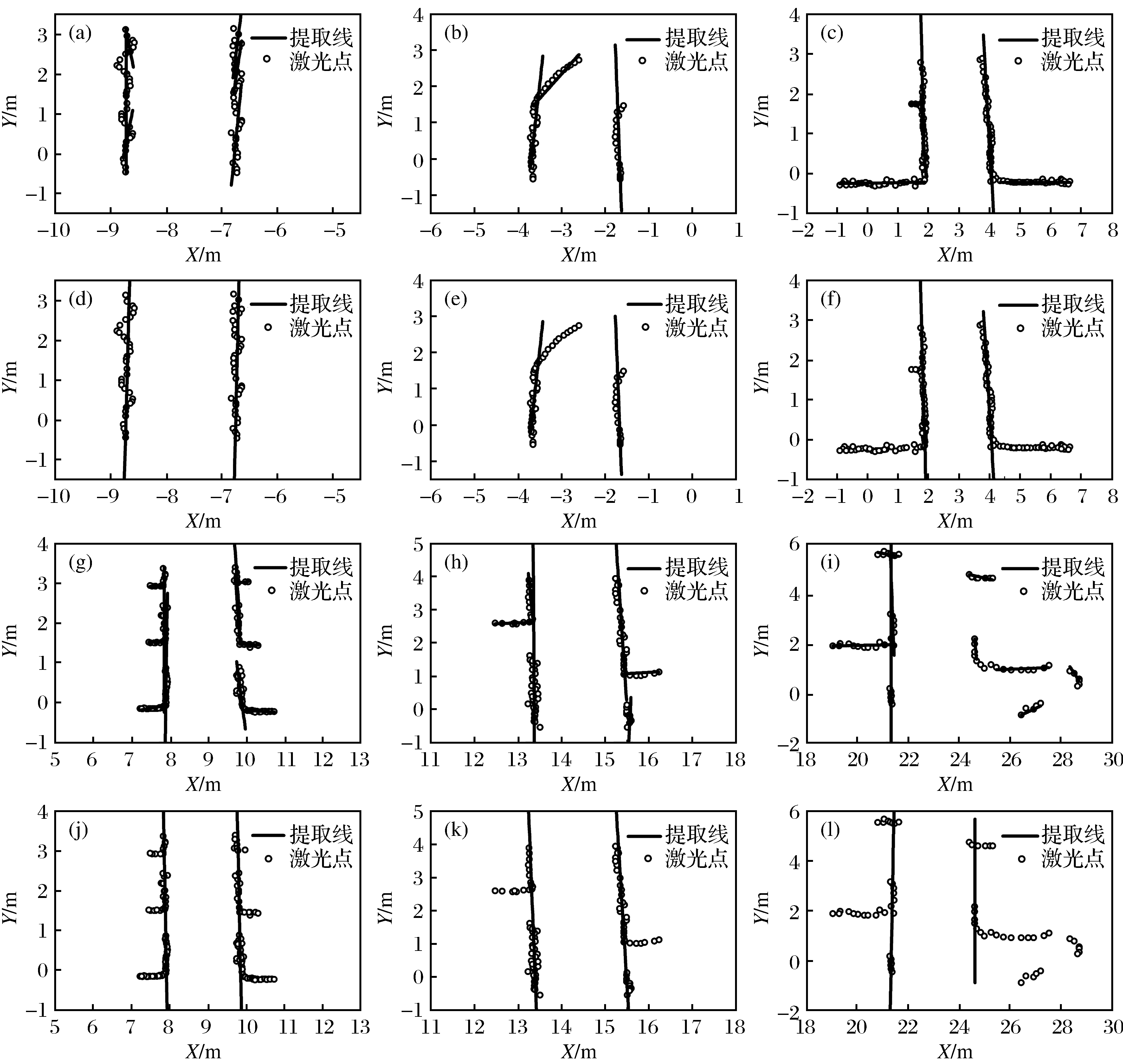
巷道边线是井下铲运机反应式导航系统中重要的感知信息。为了准确可靠地在井下环境中感知巷道边线,提出一种基于二维激光扫描信息和随机抽样一致性(RANSAC)的巷道边线检测算法。首先计算每个激光点的曲率,根据曲率阈值将激光点云划分为多个区域;然后基于RANSAC从每个区域提取直线,并根据铲运机航向角及巷道的设计标准进行筛选;最后合并筛选后的激光点云数据,使用RANSAC算法生成最终的巷道边线。基于地下矿山6种典型的巷道场景对算法效果进行验证,结果显示提取的巷道边线可靠度均达到96%以上,且算法具有很高的实时性和稳健性。
中图分类号:
| 1 | Dragt B J.Modeling and Control of an Autonomous Underground Vehicle[D].Pretoria:University of Pretoria,2006. |
| 2 | 陈盟,王李管,贾明涛,等.地下铲运机自主导航研究现状及发展趋势[J].中国安全科学学报,2013,23(3):130-134. |
| Chen Meng,Wang Liguan,Jia Mingtao,et al.An overview of autonomous navigation techniques and development trend for underground LHD[J].China Safety Science Journal,2013,23(3):130-134. | |
| 3 | 姜勇.基于双变量PID控制算法的地下智能铲运机自主导航技术研究[J].机械制造,2016,54(5):19-22. |
| Jiang Yong.Technical study on autonomous navigation of smart underground scraper based on bivariate PID control algorithm[J].Machinery,2016,54(5):19-22. | |
| 4 | 杨超,陈树新,刘立,等.反应式导航在地下自主行驶铲运机中的应用[J].煤炭学报,2011,36(11):1943-1948. |
| Yang Chao,Chen Shuxin,Liu Li,et al.Reactive navigation for underground autonomous scraper[J].Journal of China Coal Society,2011,36(11):1943-1948. | |
| 5 | Larsson J.Reactive Navigation of an Autonomous Vehicle in Underground Mines[D].Orebro:Orebro University,2007. |
| 6 | Borenstein J,Everett H R,Feng L,et al.Mobile robot positioning:Sensors and techniques[J].Journal of Robotic Systems,1997,14(4):231-249. |
| 7 | 李晓梅,贾明涛,李宁,等.基于模糊控制的井下自主铲运机的安全导航[J].矿冶工程,2013,33(4):22-26. |
| Li Xiaomei,Jia Mingtao,Li Ning,et al.Safe navigation of underground autonomous carry scraper based on fuzzy control[J].Mining and Metallurgical Engineering,2013,33(4):22-26. | |
| 8 | 张绍光.基于局部重建的点云特征点提取[D].大连:大连理工大学,2013. |
| Zhang Shaoguang.Feature Detection on Point Clouds Via Local Reconstruction[D].Dalian:Dalian University of Technology,2013. | |
| 9 | 陈岚峰,杨静瑜,崔崧,等.基于MATLAB的最小二乘曲线拟合仿真研究[J].沈阳师范大学学报(自然科学版),2014,32(1):75-79. |
| Chen Lanfeng,Yang Jingyu,Cui Song,et al.MATLAB simulation of curve fitting based on least-squares[J].Journal of Shenyang Normal University (Natural Science Edition),2014,32(1):75-79. | |
| 10 | Hough V,Paul C.Method and means for recognizing complex patterns:U.S.,1771560 [P].1960-03-25. |
| 11 | Fischler M A,Bolles R C.A paradigm for model fitting with applications to image analysis and automated cartography[J].Communications of the Association for Computing Machinery,1981,24(6):381-395. |
| 12 | Larsson J,Broxvall M,Saffiotti A.Laser based corridor detection for reactive navigation[J].Industrial Robot,2008,35(1):69-79. |
| 13 | 王旭宸,卢欣辰,张恒胜,等.一种基于平行坐标系的车道线检测算法[J].电子科技大学学报,2018,47(3):362-367. |
| Wang Xuchen,Lu Xinchen,Zhang Hengsheng,et al.A lane detection method based on parallel coordinate system[J].Journal of University of Electronic Science and Technology of China,2018,47(3):362-367. | |
| 14 | 杜恩宇,张宁,李艳荻.基于Gabor滤波器的车道线快速检测方法[J].红外与激光工程,2018,47(8):304-311. |
| Du Enyu,Zhang Ning,Li Yandi.Lane line quick detection method based on Gabor filter[J].Infrared and Laser Engineering,2018,47(8):304-311. | |
| 15 | 段建民,李岳,庄博阳.基于改进SIS算法和顺序RANSAC的车道线检测方法研究[J].计算机测量与控制,2018,26(8):280-284,289. |
| Duan Jianmin,Li Yue,Zhuang Boyang.Lane line detection method research based on improved algorithm of SIS and sequential RANSAC[J].Computer Measurement and Control,2018,26(8):280-284,289. | |
| 16 | 贾会群,魏仲慧,何昕,等.基于神经网络与最小二乘法的车道线检测算法研究[J].汽车工程,2018,40(3):363-368. |
| Jia Huiqun,Wei Zhonghui,He Xin,et al.A research on lane marking detection algorithm based on neural network and least squares method[J].Automotive Engineering,2018,40(3):363-368. | |
| 17 | 游俊甫.基于RANSAC的点云数据特征提取[D].南昌:东华理工大学,2015. |
| You Junpu.Feature Extraction of Point Cloud Data Based on RANSAC[D].Nanchang:East China University of Technology,2015. | |
| 18 | Zhang J,Singh S.Low-drift and real-time lidar odometry and mapping[J].Autonomous Robots,2017,41(2):401-416. |
| [1] | 孙越,邹昀,康文宝,王黎明,贾智. 地下无人矿卡智能调度系统框架及应用研究[J]. 黄金科学技术, 2023, 31(1): 133-143. |
| [2] | 李杰林,杨承业,彭朝智,周科平,刘锐凯. 三维激光扫描技术在地下巷道岩体结构面识别的应用[J]. 黄金科学技术, 2021, 29(2): 236-244. |
| [3] | 毕林,王黎明,段长铭. 矿井环境高精定位技术研究现状与发展[J]. 黄金科学技术, 2021, 29(1): 3-13. |
| [4] | 吴家希,王李管,李亚龙. 基于V-REP的井下铲运机自主作业仿真试验软件平台研究[J]. 黄金科学技术, 2020, 28(1): 124-133. |
| [5] | 胡建华,徐朔寒,徐泽林,韩磊. 城市地下矿山采矿方法的数值与熵权耦合优选[J]. 黄金科学技术, 2019, 27(4): 513-521. |
| [6] | 刘定一, 王李管, 陈鑫, 钟德云, 徐志强. 地下矿中长期计划多目标优化及应用研究[J]. 黄金科学技术, 2018, 26(2): 228-233. |
| [7] | 聂兴信,张国丹. 基于熵值法—突变理论的地下矿山紧急避险系统可靠性研究[J]. 黄金科学技术, 2016, 24(6): 72-77. |
| [8] | 陈建宏,曾闵,李涛,江时雨. 基于物元分析—未确知测度理论的地下矿山安全避险“六大系统”可靠性评估方法[J]. 黄金科学技术, 2015, 23(1): 80-84. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000


 甘公网安备 62010202000672号
甘公网安备 62010202000672号