黄金科学技术 ›› 2021, Vol. 29 ›› Issue (1): 25-34.doi: 10.11872/j.issn.1005-2518.2021.01.167
刘永春1,2( ),王李管1,2(),吴家希1,2
),王李管1,2(),吴家希1,2
Yongchun LIU1,2(),Liguan WANG1,2(),Jiaxi WU1,2
摘要:
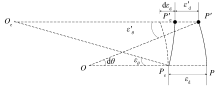
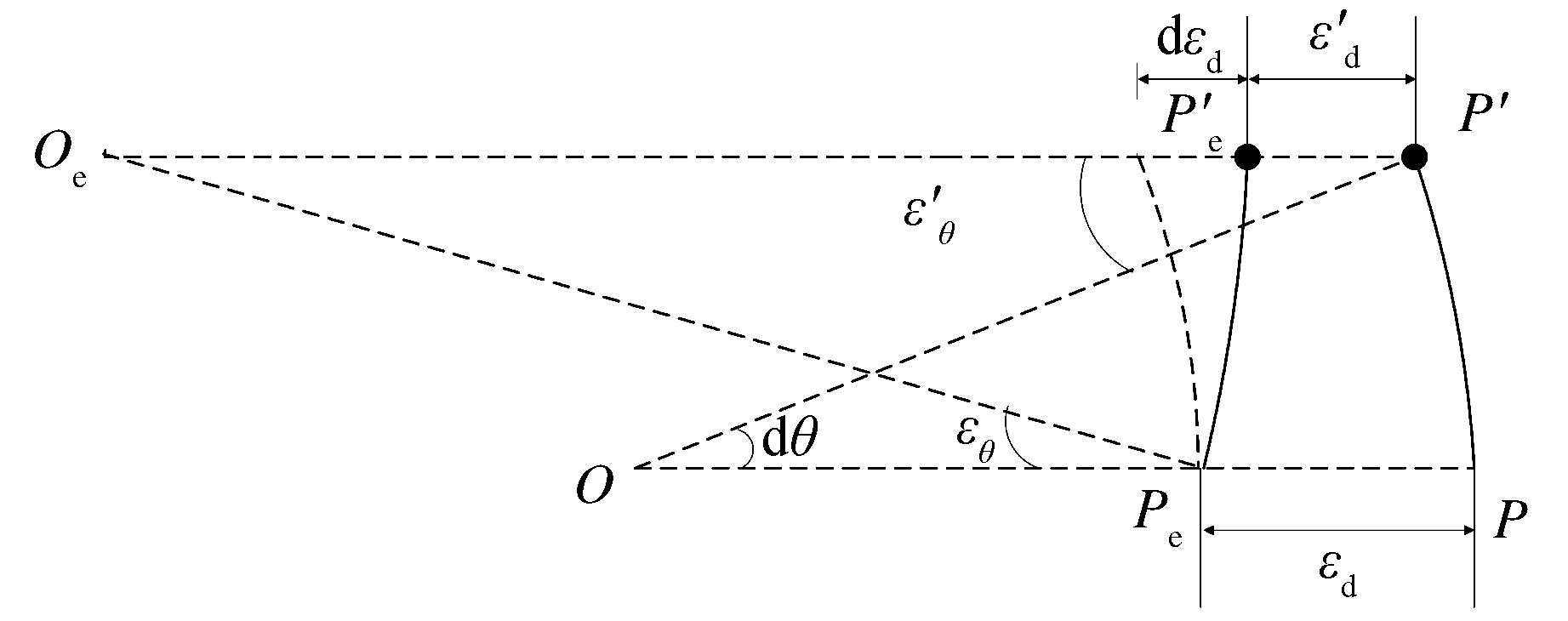
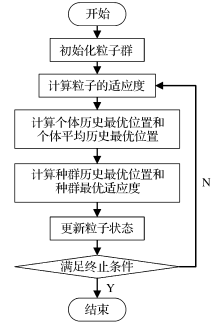
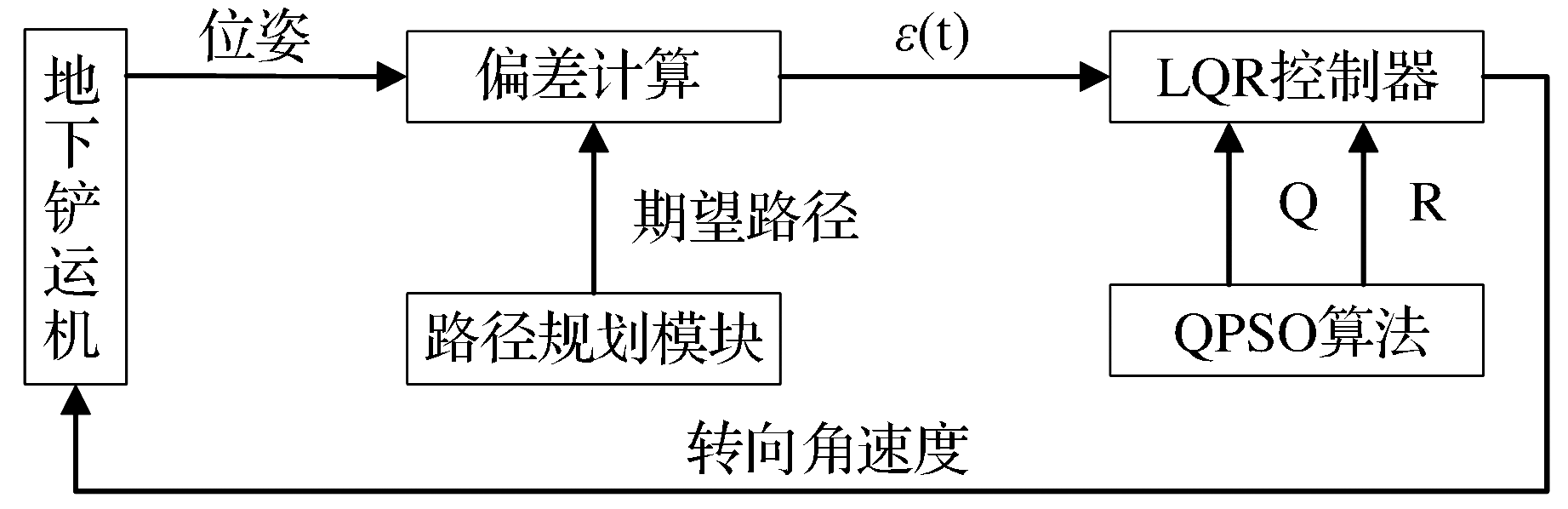
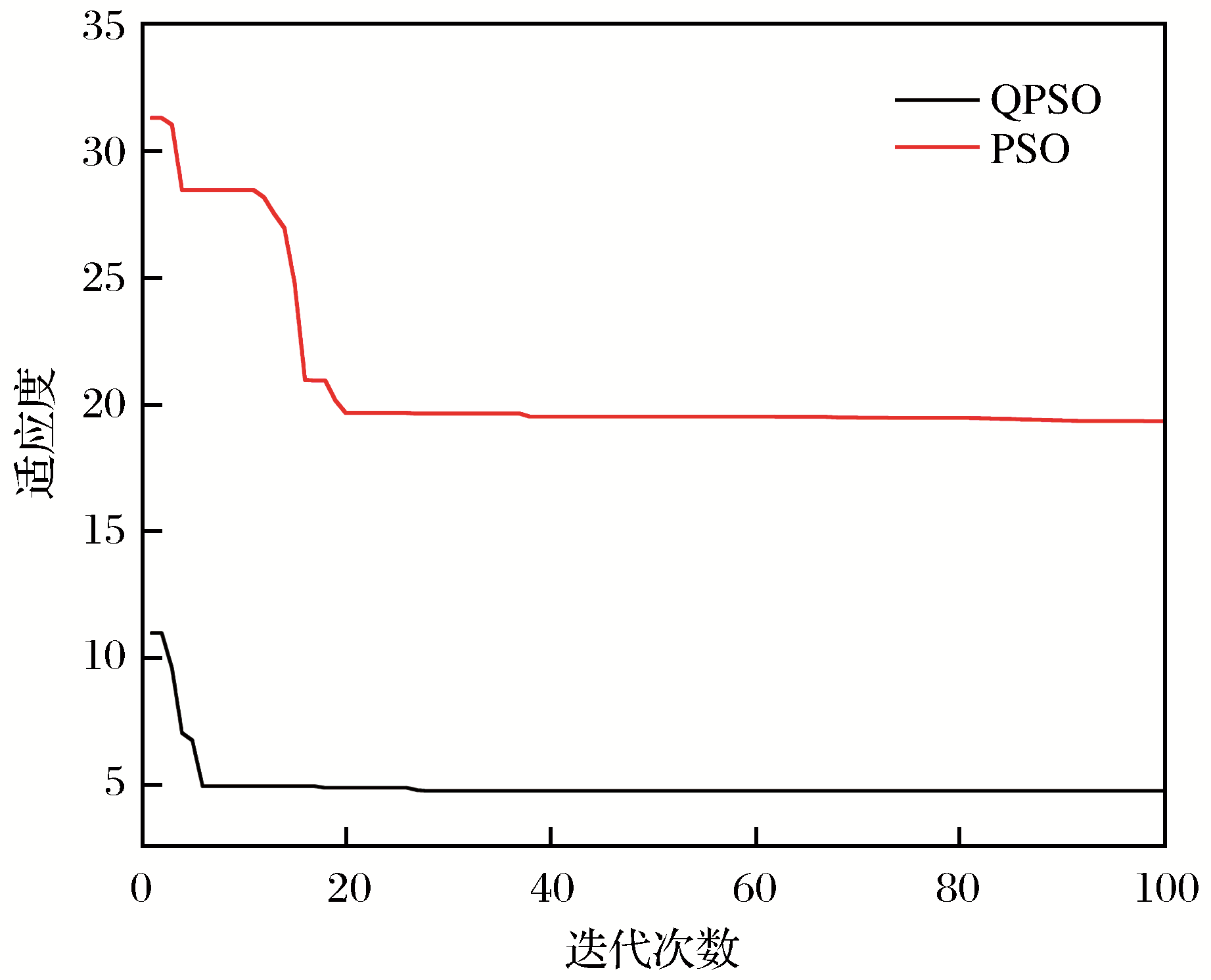
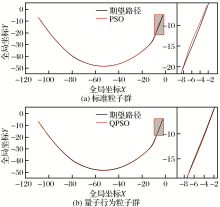
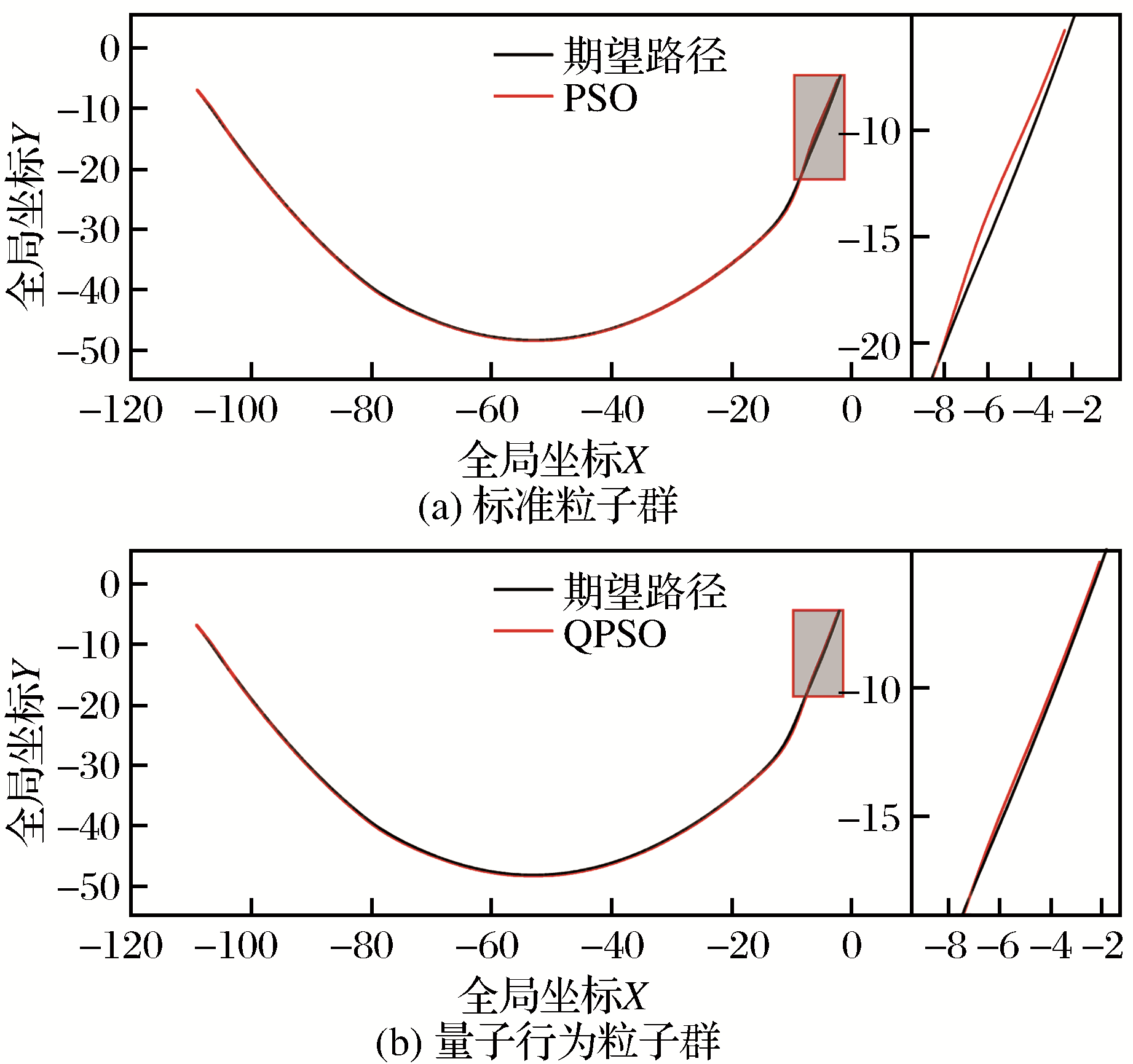
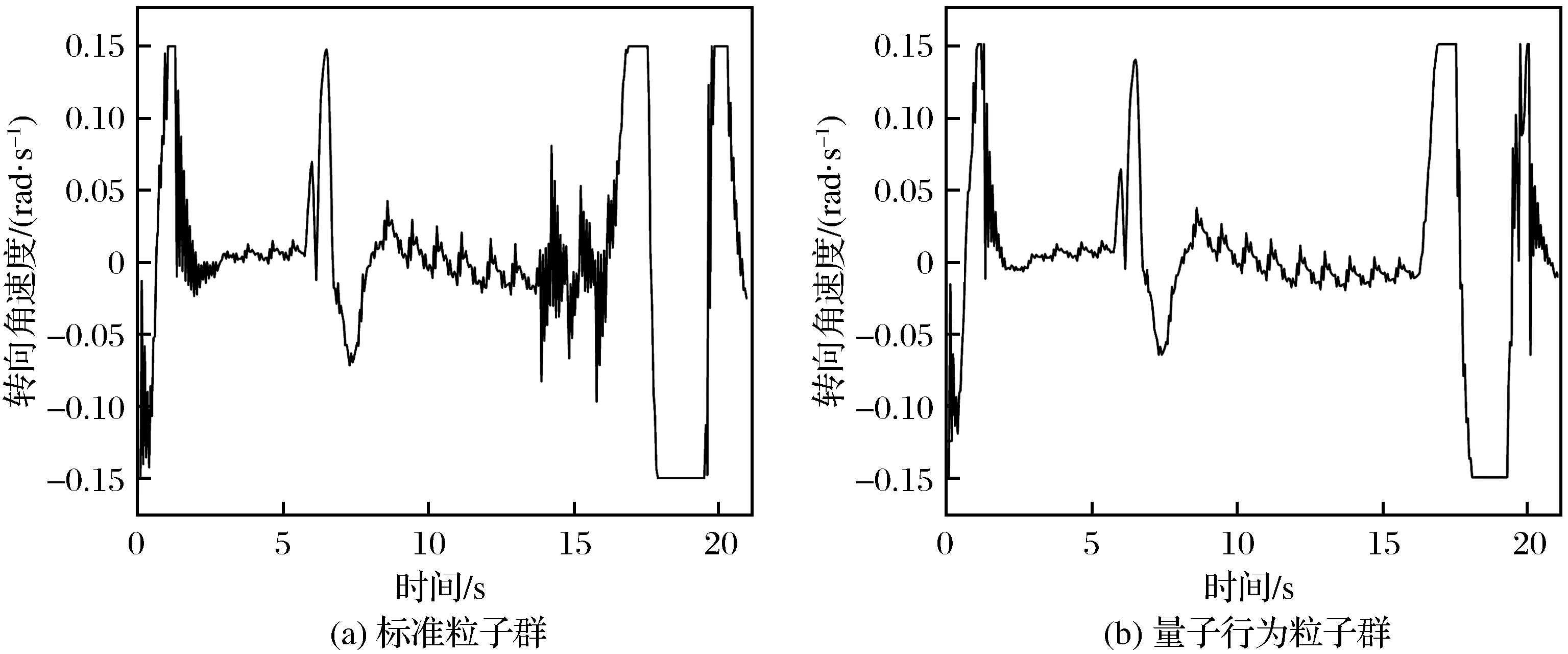
现代控制理论是实现地下铲运机路径跟踪控制的重要技术之一。目前,控制算法应用的难点在于参数的选取和整定。为解决控制参数整定问题,提出应用量子行为粒子群优化算法(QPSO)对基于线性二次型调节(LQR)的状态反馈控制器进行参数优化,实现对地下铲运机精准、稳定的路径跟踪控制。状态反馈控制器基于铲运机的误差动力学模型得出,优化后的路径跟踪控制最大横向位置偏差低于0.23 m。仿真试验结果表明:相较于标准粒子群优化算法,QPSO算法优化的路径跟踪控制器的最大横向位置偏差减小53.4%,优化效果更好、成功率更高。
中图分类号:
| Fang Wei,Sun Jun,Xie Zhenping,al et,2010.Convergence analysis of quantum-behaved particle swarm optimization algorithm and study on its control parameter[J].Journal of Physics,59(6):3686-3694. Guo Xin,Zhan Kai,Gu Hongshu,al et,2009.Navigation system research of unmanned scraper[J].Nonferrous Metals,61(4):143-147. Gupta S,Tripathi R K,2014.Optimal LQR controller in CSC based STATCOM using GA and PSO[J].Archives of Electrical Engineering,63(3):469-487. Kang Yan,Sun Jun,Xu Wenbo,2007.Parameter selection of quantum-behaved particle swarm optimization[J].Computer Engineering and Applications,43(23):40-42. Kemmoé Tchomté S,Gourgand M,2009.Particle swarm optimization:A study of particle displacement for solving continuous and combinatorial optimization problems(Article)[J].International Journal of Production Economics,121(1):57-67. Kennedy J,Eberhart R,1995.Particle swarm optimization[C]//International Conference on Neural Networks.Perth:IEEE:1942-1948. Li Guoyong,2008.Optimal Control Theory and Application[M].Beijing:National Defence Industry Press:246. Li Jianguo,Zhan Kai,Shi Feng,al et,2015.Auto-driving technology for underground scraper based on optimal trajectory tracking[J].Journal of Agricultural Engineering,46(12):323-328. Liu Hongbo,Wang Xiukun,Tan Guozhen,2006.Convergence analysis of particle swarm optimization and its improved algorithm based on Chaos[J].Control and Decision,21(6):636-640. Luo Weidong,Ma Baoquan,Meng Yu,al et,2020.Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC[J].Journal of China Coal Society,45(4):1536-1546. Meng Yu,Wang Jue,Gu Qing,al et,2018.LQR- GA path tracking control of articulated vehicle based on predictive information [J].Transactions of the Chinese Society for Agricultural Machinery,49(6):375-384. Nayl T,Nikolakopoulos G,Gustafsson T,2015.Effect of kinematic parameters on MPC based on-line motion planning for an articulated vehicle[J].Robotics and Autonomous Systems,70:16-24. Ridley P,Corke P,2003.Load haul dump vehicle kinematics and control[J].Journal of Dynamic Systems. Measurement and Control,125(1):54-59. Sasiadek J Z,Lu Y,2005.Path tracking of an autonomous LHD articulated vehicle [C]//The 16th IFAC World Congress.Prague:IFAC:55-60. Shi Y,Eberhart R,1998.A modified particle swarm optimizer[C]//IEEE International Conference on Evolutionary Computation.Anchorage: IEEE:69-73. Shiroma N,Ishikawa S,Inoue K,al et,2009.Nonlinear straight path tracking control for an articulated steering type vehicle [C]//SICE Annual Conference.Fukuoka:IEEE:2206-2211. Sun J,Feng B,Xu W,2004.Particle swarm optimization with particles having quantum behavior[C]//Congress on Evolutionary Computation.Portland:IEEE,(1):325-331. Van den Bergh F,2001.An Analysis of Particle Swarm Optimizers[D].Pretoria:University of Pretoria. Wang Yong,2000.Research on Nonlinear PID Control[D].Nanjing:Nanjing University of Science and Technology. Zhang Donglin,2002.Undergound LHD[M].Beijing:Metallurgical Industry Press:509. Zhao Xuan,Yang Jue,Zhang Wenming,al et,2015.Sliding mode control algorithm for path tracking of articulated dump truck[J].Journal of Agricultural Engineering,31(10):198-203. Zheng Weibo,2016.Research on Improvement of Particle Swarm Optimization Algorithm and Its Application[D].Qingdao:Qingdao University Zou Chenchen,2017.Study on the Control of LQR Linear Two-stage Inverted Pendulum Based on Particle Swarm Optimization[D].Xi’an:Xi’an University of Science and Technology. 方伟,孙俊,谢振平,等,2010.量子粒子群优化算法的收敛性分析及控制参数研究[J].物理学报,59(6):3686-3694. 郭鑫,战凯,顾洪枢,等,2009.无人操纵铲运机井下导航研究[J].有色金属,61(4):143-147. 康燕,孙俊,须文波,2007.具有量子行为的粒子群优化算法的参数选择[J].计算机工程与应用,43(23):40-42. 李国勇,2008.最优控制理论与应用[M].北京:国防工业出版社:246. 李建国,战凯,石峰,等,2015.基于最优轨迹跟踪的地下铲运机无人驾驶技术[J].农业机械学报,46(12):323-328. 刘洪波,王秀坤,谭国真,2006.粒子群优化算法的收敛性分析及其混沌改进算法[J].控制与决策,21(6):636-640. 罗维东,马宝全,孟宇,等,2020.基于NMPC的地下无人铲运机反应式导航系统[J].煤炭学报,45(4):1536-1546. 孟宇,汪钰,顾青,等,2018.基于预见位姿信息的铰接式车辆LQR-GA路径跟踪控制[J].农业机械学报,49(6):375-384. 王勇,2000.非线性PID控制的研究[D].南京:南京理工大学. |
| [1] | 姜丹,王李管. 地下铲运机自主铲装技术现状及发展趋势[J]. 黄金科学技术, 2021, 29(1): 35-42. |
| [2] | 许瑞, 侯奎奎, 王玺, 刘兴全, 李夕兵. 基于核主成分分析与SVM的岩爆烈度组合预测模型[J]. 黄金科学技术, 2020, 28(4): 575-584. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000





 甘公网安备 62010202000672号
甘公网安备 62010202000672号