黄金科学技术 ›› 2022, Vol. 30 ›› Issue (3): 460-469.doi: 10.11872/j.issn.1005-2518.2022.03.006
王鹏飞( ),毕林,王李管()
),毕林,王李管()
Pengfei WANG(),Lin BI,Liguan WANG()
摘要:
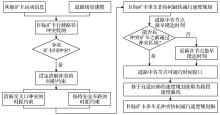
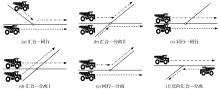
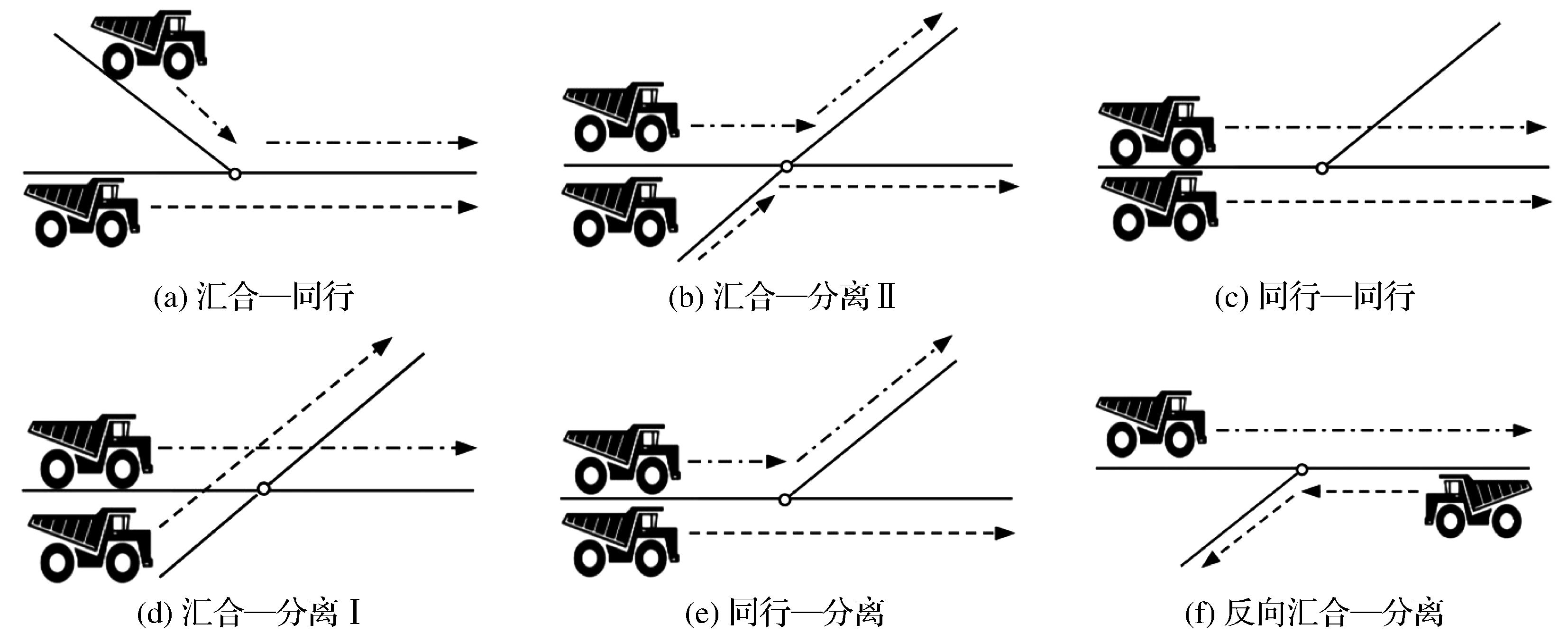
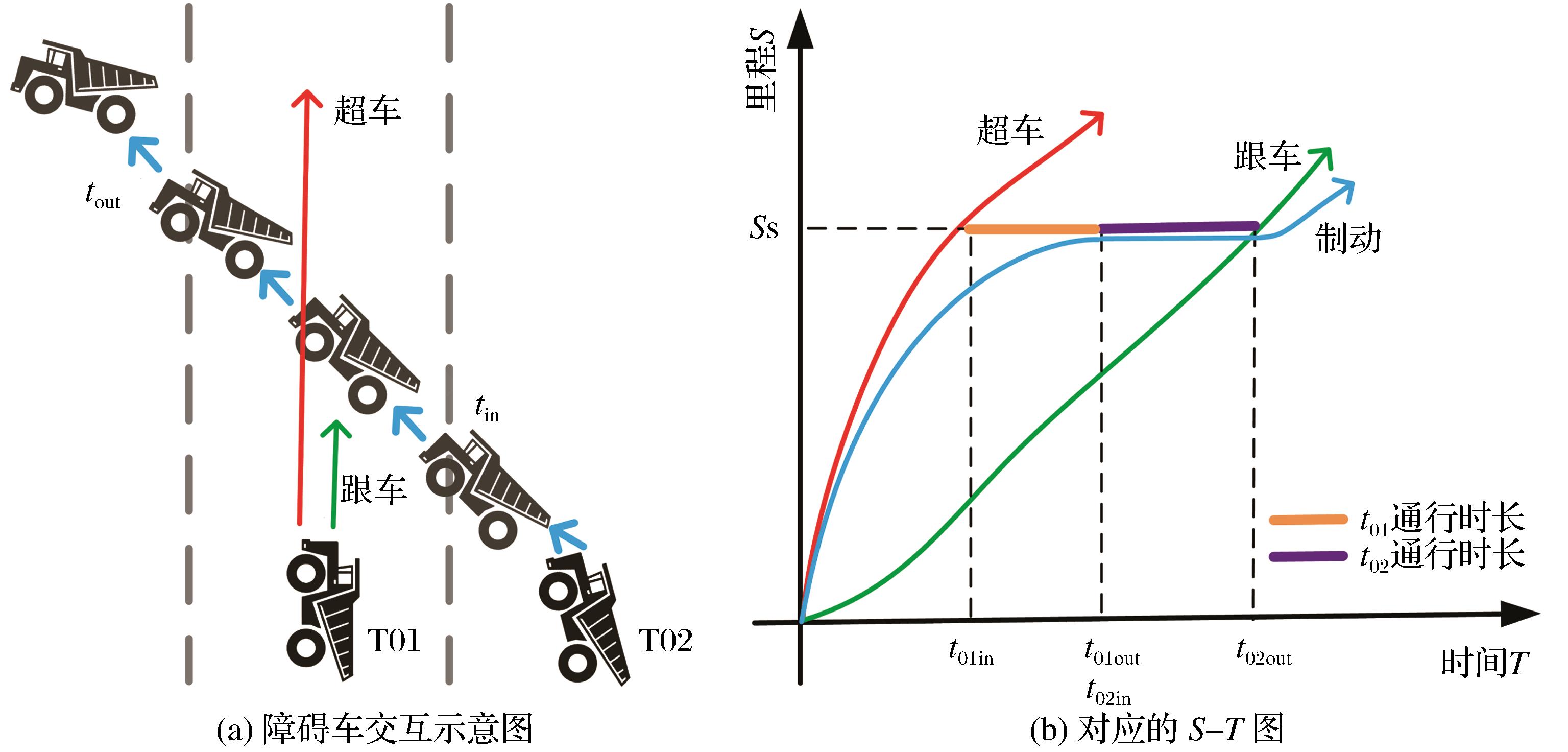
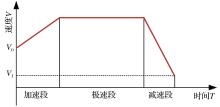
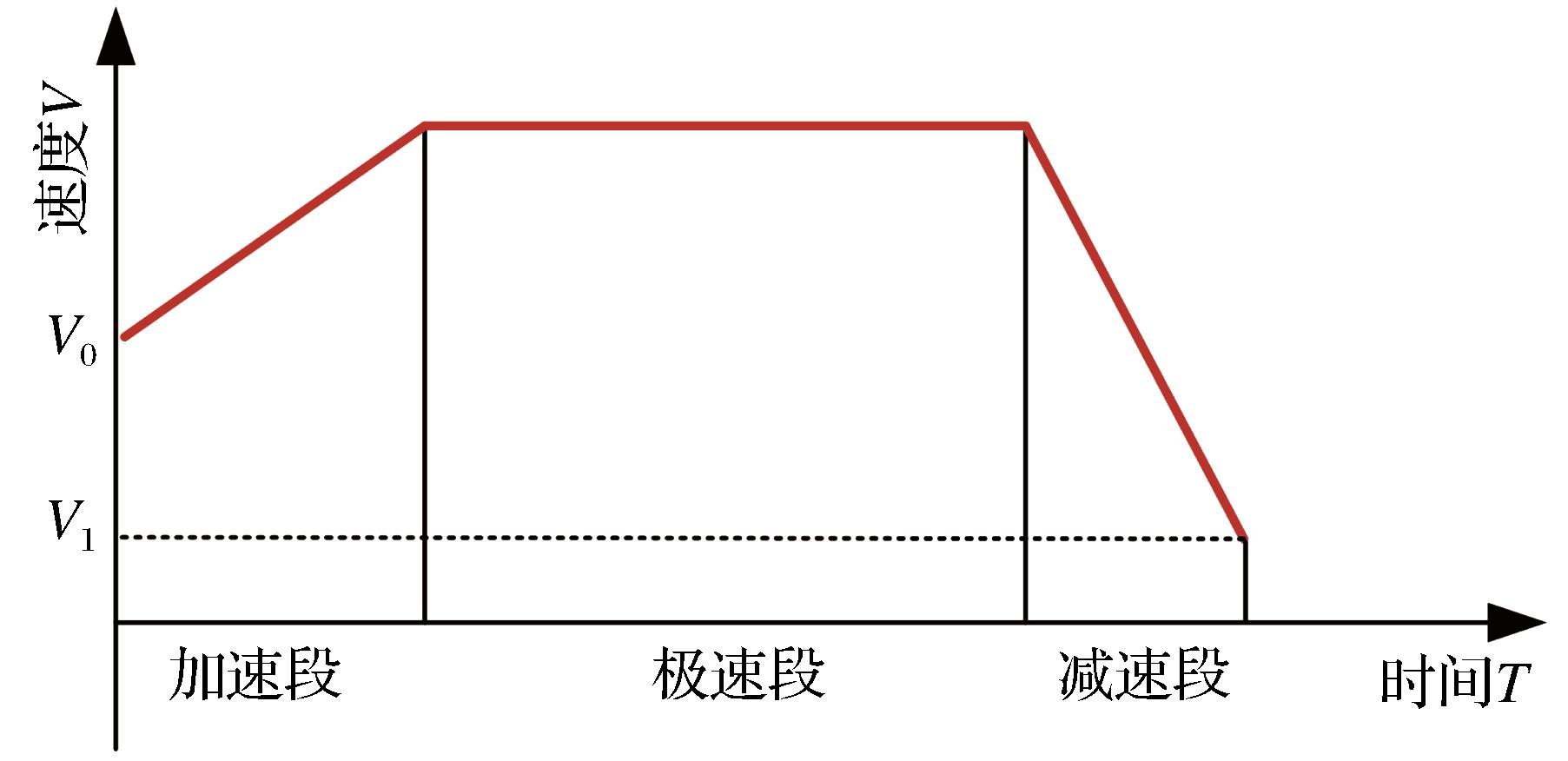
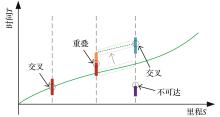
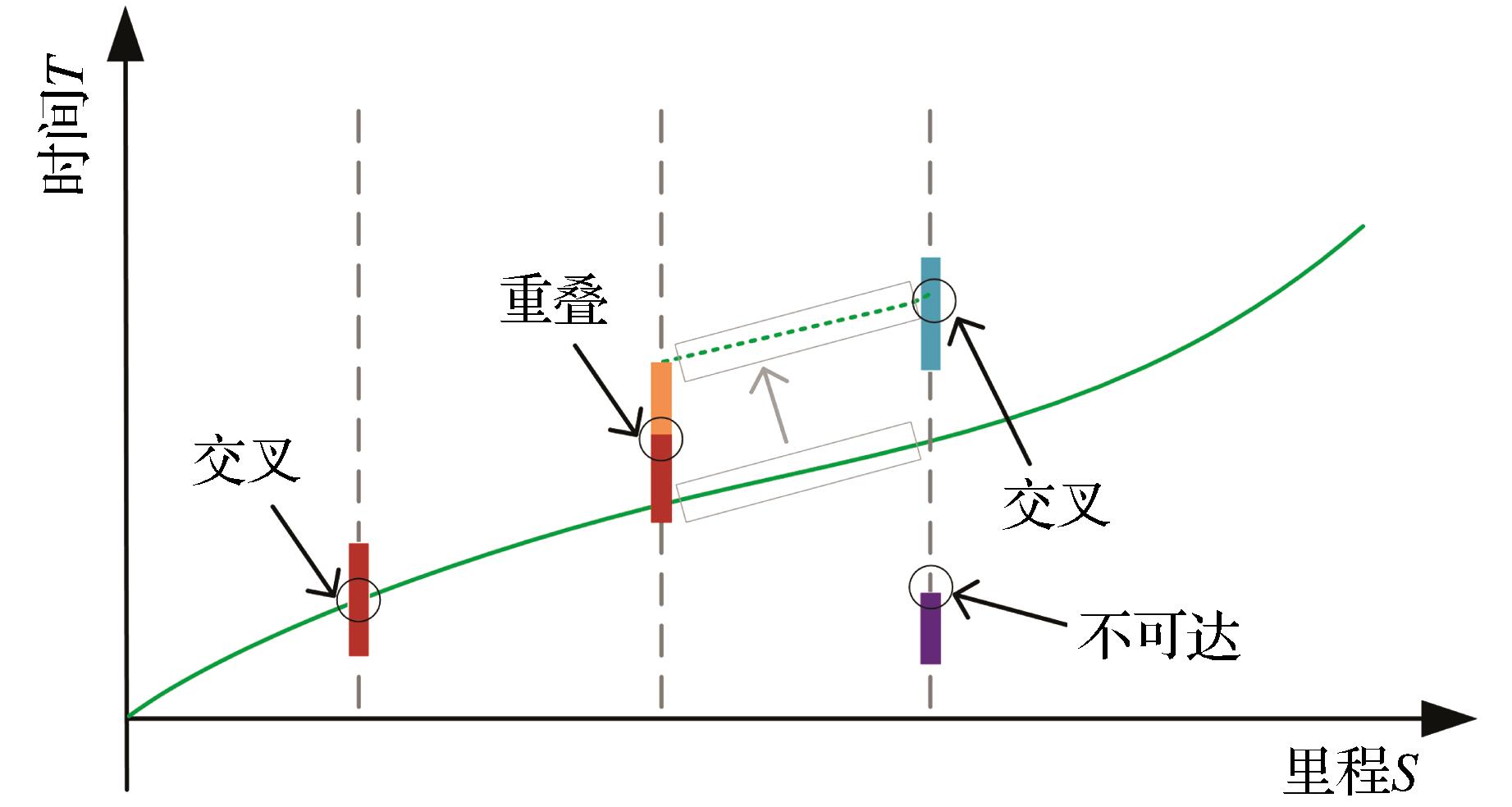
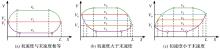
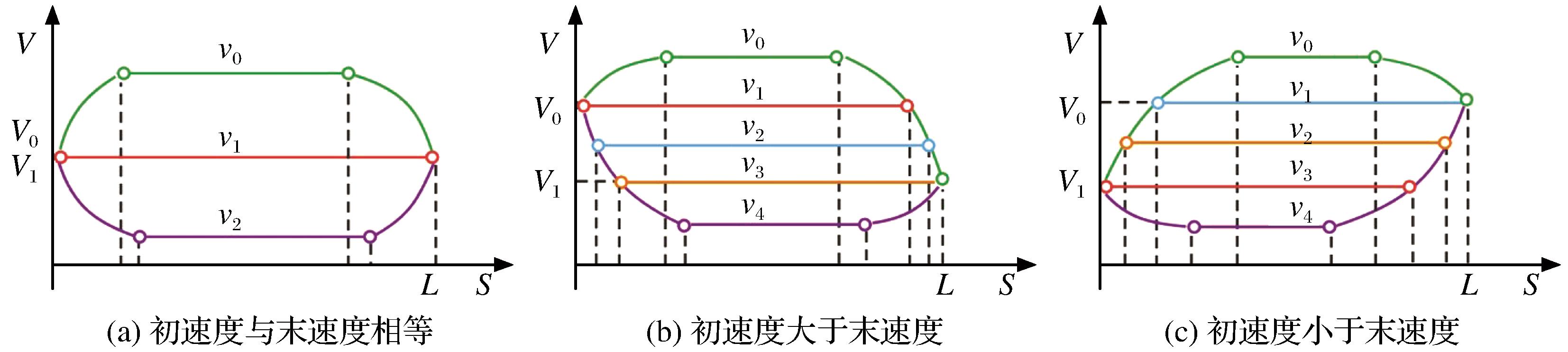
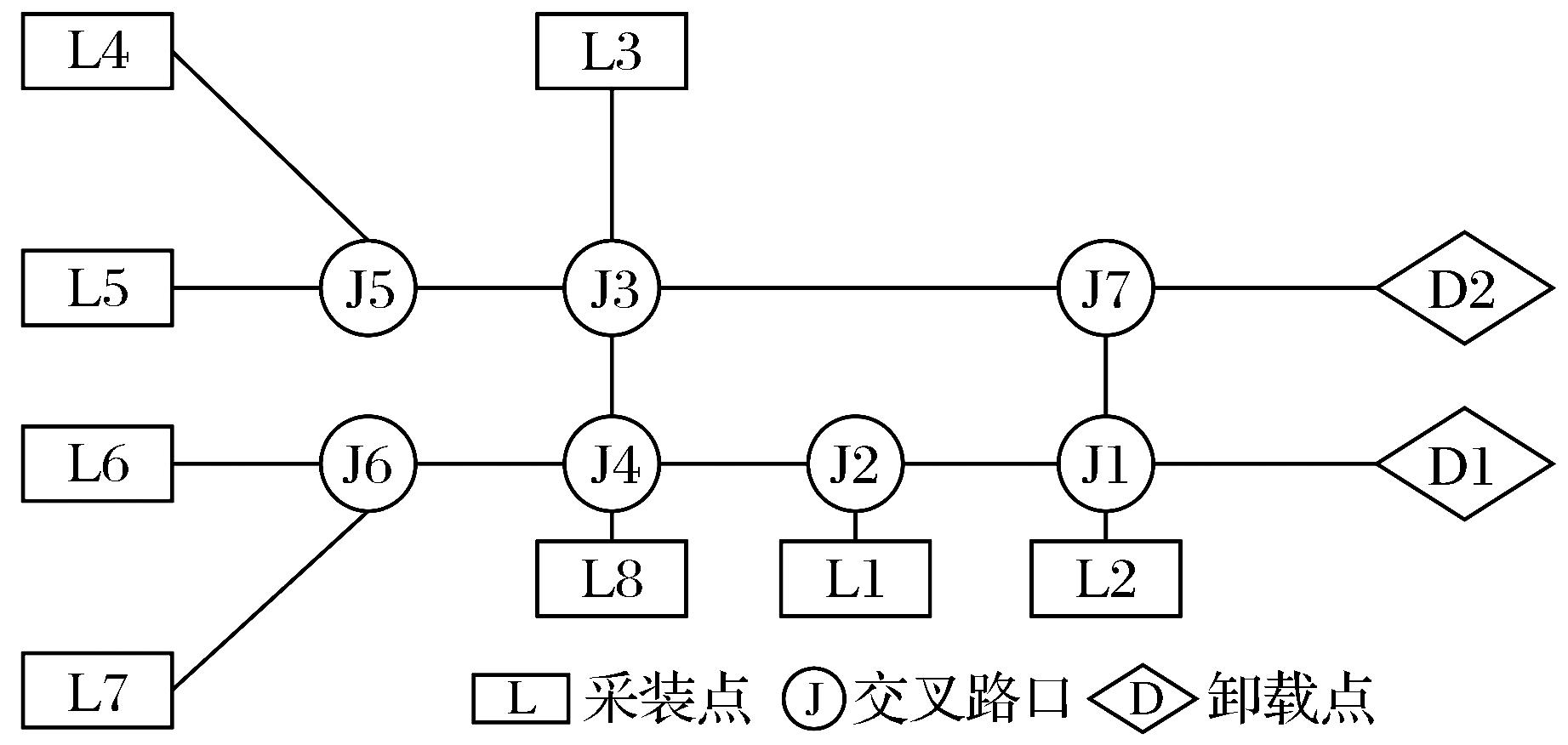
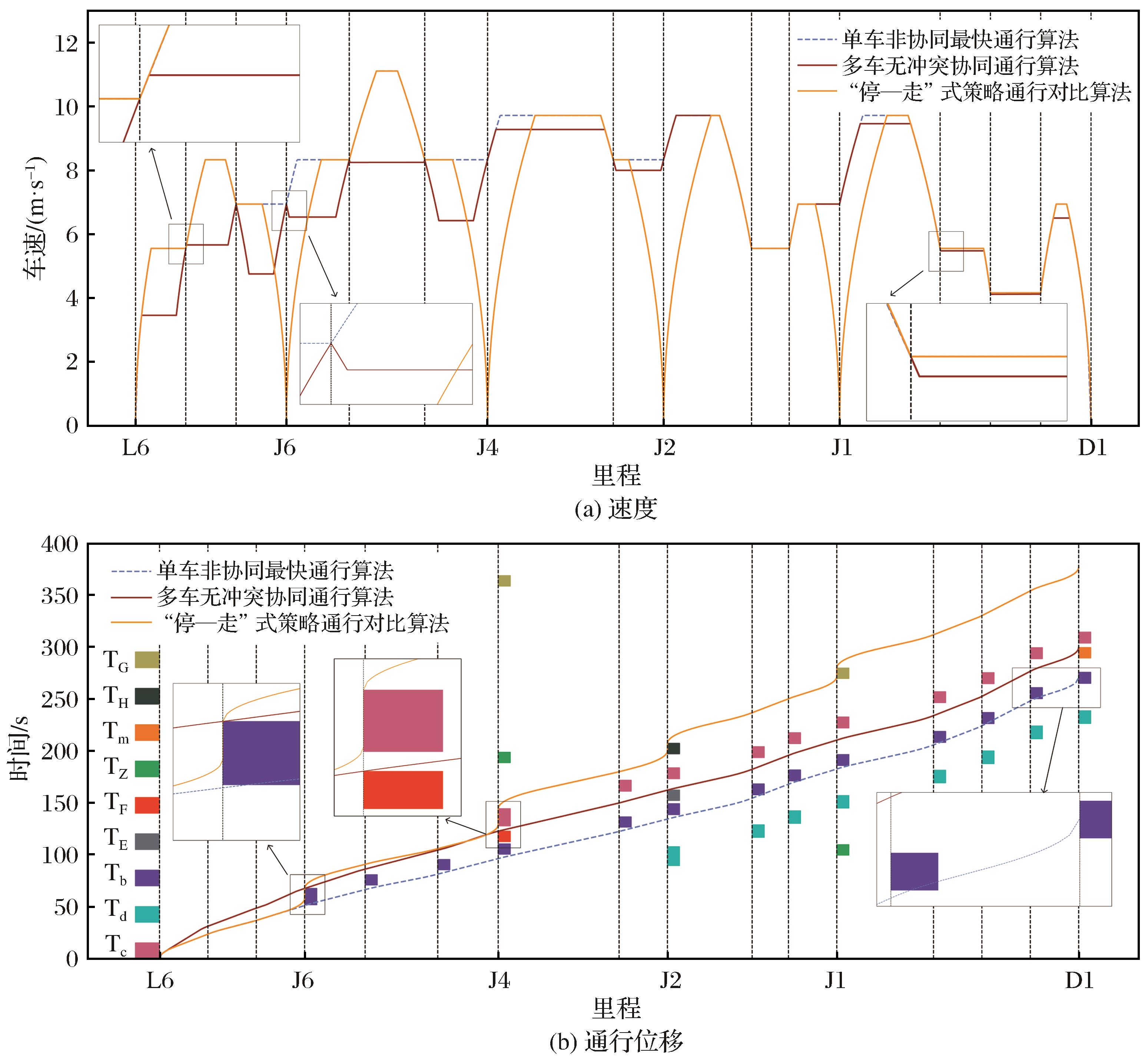
露天矿道路结构复杂,由于行驶轨迹冲突、感知受限等原因,矿卡行驶中易发生碰撞事故,现有基于传感器的感知避障方法易出现急刹急停和减速停车再启动等决策,不仅造成轮胎磨损和燃油浪费,而且会严重影响通行效率。为解决上述问题,结合露天矿通行场景的特殊性以及无人驾驶矿卡可精准执行规划速度的优点,提出了一种基于时间距离约束消解车间冲突和基于自适应梯形速度规划方法规划速度的矿卡全程无冲突协同通行速度规划方法。试验结果表明:该方法在不影响已有矿卡正常通行的前提下消解车间冲突,提高目标矿卡行驶速度的平稳性,相对于传统“停—走”式策略通行算法总通行时长减少了21%。
中图分类号:
| Ding Zhen, Meng Feng,2020.Domestic and overseas research status and key technologies of unmanned mine trucks [J].China Coal,46(2):42-49. | |
| Duan Min, Yu Wentai, Liu Zhenpeng,2020.Research on multi-vehicle cooperative control of unmanned vehicle at intersection [J].Automobile Technology,535(4):33-39. | |
| Fu Rui, Zhang Yali, Yuan Wei,2019.Progress and prospect in research on eco-driving [J].China Journal of Highway and Transport,32(3):1-12. | |
| Gao Rui,2021.Research on Aid Decision-Making for Driving Safety of Uncrewed Mining Trucks in Open-pit Mine [D].Chongqing:Southwest University. | |
| González D, Pérez J, Milanés V,et al,2016.A review of motion planning techniques for automated vehicles[J].IEEE Transactions on Intelligent Transportation Systems,17(4) :1135-1145. | |
| Guo G, Wang Q,2019.Fuel-efficient en route speed planning and tracking control of truck platoons[J].IEEE Transaction on Intelligent Transportation Systems,20(8) :3091-3103. | |
| Kan Yuting,2020.Safety Distance Design for Unmanned Mine Trucks in Open-pit Mines Based on Sensor Reliability Analysis [D].Xuzhou:China University of Mining and Technology. | |
| Li Donglin, Lu Xiangyang, Li Lei,et al,2019.An overview of autonomous open-pit mine haulage system [J].Electric Drive for Locomotives,267(2):1-8. | |
| Liu Weifang, Wu Di,2020.Technology development status of unmanned driving in open-pit mines at home and abroad [J].Opencast Mining Technology,35(4):32-34,38. | |
| Ng E C, Huang Y, Hong G,et al,2021.Reducing vehicle fuel consumption and exhaust emissions from the application of a green-safety device under real driving[J].Science of the Total Environment,793 :148602. | |
| Sharma N, Kumar P, Dhyani R,et al,2018.Idling fuel consumption and emissions of air pollutants at selected signalized intersections in Delhi[J].Journal of Cleaner Production,212 :8-21. | |
| Su Min,2020.Research and application of V2X communication technology based on intelligent driving scene in open pit mining area [J].Digital Communication World,(11):160-161,164. | |
| Tao Qianwen, Hu Zhaozheng, Cai Hao,et al,2019.A study of vehicle perception and localization:An overview of the 29th IEEE Intelligent Vehicles Symposium[J].Journal of Transport Information and Safety,37(2):1-9. | |
| Wang Fumin, He Changbin,2021.Status and outlook of autonomous driving technology for trucks in open-pit mine [J].Opencast Mining Technology,36(3):45-47. | |
| Wu Jiang, Zheng Qunfei,2021.Feasibility study of driverless system in Harwusu open-pit coal mine[J].Metal Mine,50(2):167-172. | |
| Yu Xiangjun, Huai Yuanhui, Yao Zongwei,et al,2021.Key technologies in autonomous vehicle for engineering[J].Journal of Jilin University(Engineering and Technology Edition),51(4):1153-1168. | |
| Yu Zhuoping, Li Yishan, Xiong Lu,2017.A review of the motion planning problem of autonomous vehicle[J].Journal of Tongji University(Natural Science),45(8):1150-1159. | |
| Zhang Ning, Ma Wenshuang,2020.Analysis on technical requirements of autopilot for high-precision map[J].Logistics & Material Handling,25(1):135-137. | |
| Zhang Y, Chen H, Waslander S L,et al,2018.Toward a more complete,flexible,and safer speed planning for autonomous driving via convex optimization[J].Sensors,18(7) :2185-2185. | |
| Zheng Yi,2020.Research on Cooperative Vehicle Control Algorithm at Unsignalized Intersection Under Connected Vehicles Environment[D].Changchun:Jilin University. | |
| 丁震,孟峰,2020.矿用无人卡车国内外研究现状及关键技术[J].中国煤炭,46(2):42-49. | |
| 段敏,于文泰,刘振朋,2020.无人驾驶汽车十字路口多车协作控制研究[J].汽车技术,535(4):33-39. | |
| 付锐,张雅丽,袁伟,2019.生态驾驶研究现状及展望[J].中国公路学报,32(3):1-12. | |
| 高睿,2021.露天矿区无人驾驶矿车的安全通行辅助决策研究[D].重庆:西南大学. | |
| 阚雨婷,2020.基于传感器可靠性分析的露天矿无人驾驶矿车安全车距设计[D].徐州:中国矿业大学. | |
| 李东林,路向阳,李雷,等,2019.露天矿山运输无人驾驶系统综述[J].机车电传动,267(2):1-8. | |
| 刘伟芳,吴迪,2020.国内外露天矿山无人驾驶技术发展现状[J].露天采矿技术,35(4):32-34,38. | |
| 苏敏,2020.基于露天矿区智能驾驶场景的V2X通信技术研究及应用[J].数字通信世界,(11):160-161,164. | |
| 陶倩文,胡钊政,蔡浩,等,2019.车辆感知与定位研究——第29届国际智能车大会综述[J].交通信息与安全,37(2):1-9. | |
| 王富民,贺昌斌,2021.露天矿卡车无人驾驶技术的现状与展望[J].露天采矿技术,36(3):45-47. | |
| 武讲,郑群飞,2021.哈尔乌素露天矿无人驾驶方案研究[J].金属矿山,50(2):167-172. | |
| 于向军,槐元辉,姚宗伟,等,2021.工程车辆无人驾驶关键技术[J].吉林大学学报(工学版),51(4):1153-1168. | |
| 余卓平,李奕姗,熊璐,2017.无人车运动规划算法综述[J].同济大学学报(自然科学版),45(8):1150-1159. | |
| 张宁,马文双,2020.自动驾驶对于高精地图的技术需求分析[J].物流技术与应用,25(1):135-137. | |
| 郑义,2020.车联网环境下无信号交叉口车辆协同控制算法研究[D].长春:吉林大学. |
| [1] | 李振阳, 张宝岗, 熊信, 杨承业, 白玉奇. 基于PSO-XGBoost的露天矿山PPV预测模型研究[J]. 黄金科学技术, 2024, 32(4): 620-630. |
| [2] | 顾清华, 周琼, 王丹. 基于改进YOLOv8的露天矿区行车障碍物检测[J]. 黄金科学技术, 2024, 32(2): 345-355. |
| [3] | 代树红, 张战军, 柳凯, 郑昊, 孙清林. 基于PEMD-MPE算法的露天矿爆破振动信号降噪方法[J]. 黄金科学技术, 2024, 32(1): 82-90. |
| [4] | 顾清华, 杜艺凡, 李萍丰, 王丹. 基于加权双向特征融合的矿区道路落石检测[J]. 黄金科学技术, 2023, 31(6): 953-963. |
| [5] | 海龙, 冯丽鑫, 谭世林, 吕勇博. 根土复合体加固露天矿山排土场边坡研究[J]. 黄金科学技术, 2023, 31(6): 911-918. |
| [6] | 阮顺领,董莉娟,卢才武,顾清华. 基于RCR _YOLOv4的矿井巷道红外障碍检测研究[J]. 黄金科学技术, 2022, 30(4): 603-611. |
| [7] | 吴钦正,李润然,李桂林,李金平,尹延天,徐帅. 基于JKSimBlast软件的露天矿爆破毫秒延期时间优化[J]. 黄金科学技术, 2021, 29(6): 854-862. |
| [8] | 王京华,王李管,毕林. 基于计算机视觉技术的矿井电机车无人驾驶障碍物检测技术[J]. 黄金科学技术, 2021, 29(1): 136-146. |
| [9] | 张二洋,陈建宏. 基于Surpac矿山设计软件及虚幻引擎实现的矿山虚拟现实漫游系统[J]. 黄金科学技术, 2017, 25(4): 93-98. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000







 甘公网安备 62010202000672号
甘公网安备 62010202000672号