黄金科学技术 ›› 2022, Vol. 30 ›› Issue (4): 603-611.doi: 10.11872/j.issn.1005-2518.2022.04.013
阮顺领1,2( ),董莉娟1(),卢才武1,2,顾清华1,2
),董莉娟1(),卢才武1,2,顾清华1,2
Shunling RUAN1,2(),Lijuan DONG1(),Caiwu LU1,2,Qinghua GU1,2
摘要:
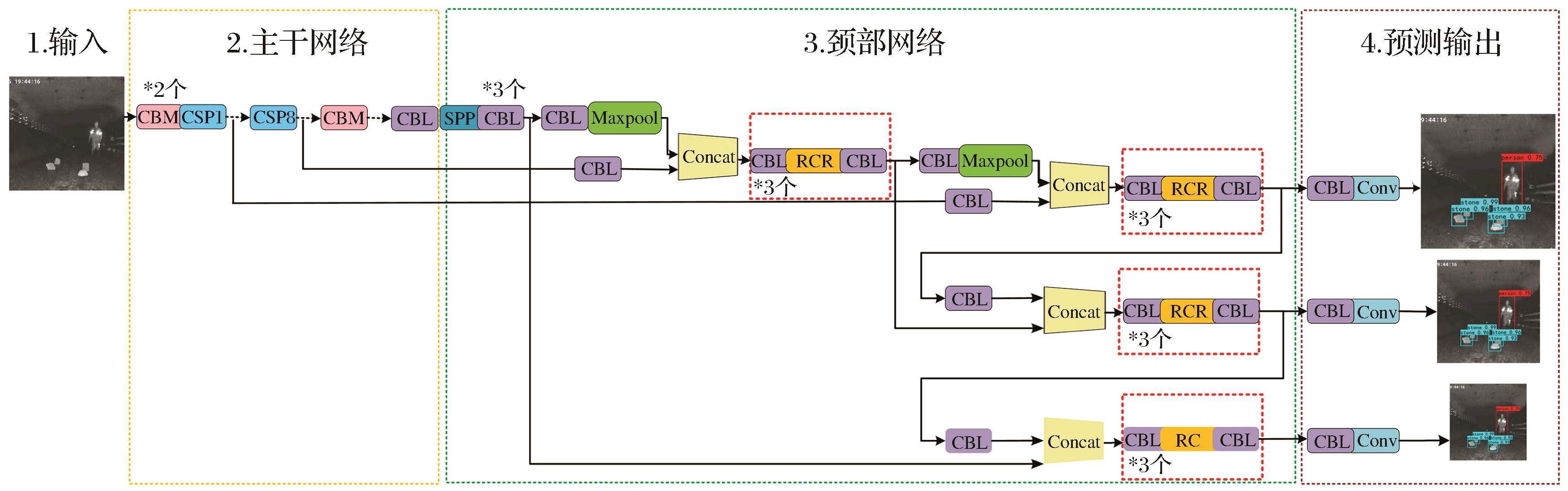
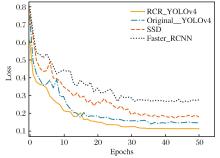
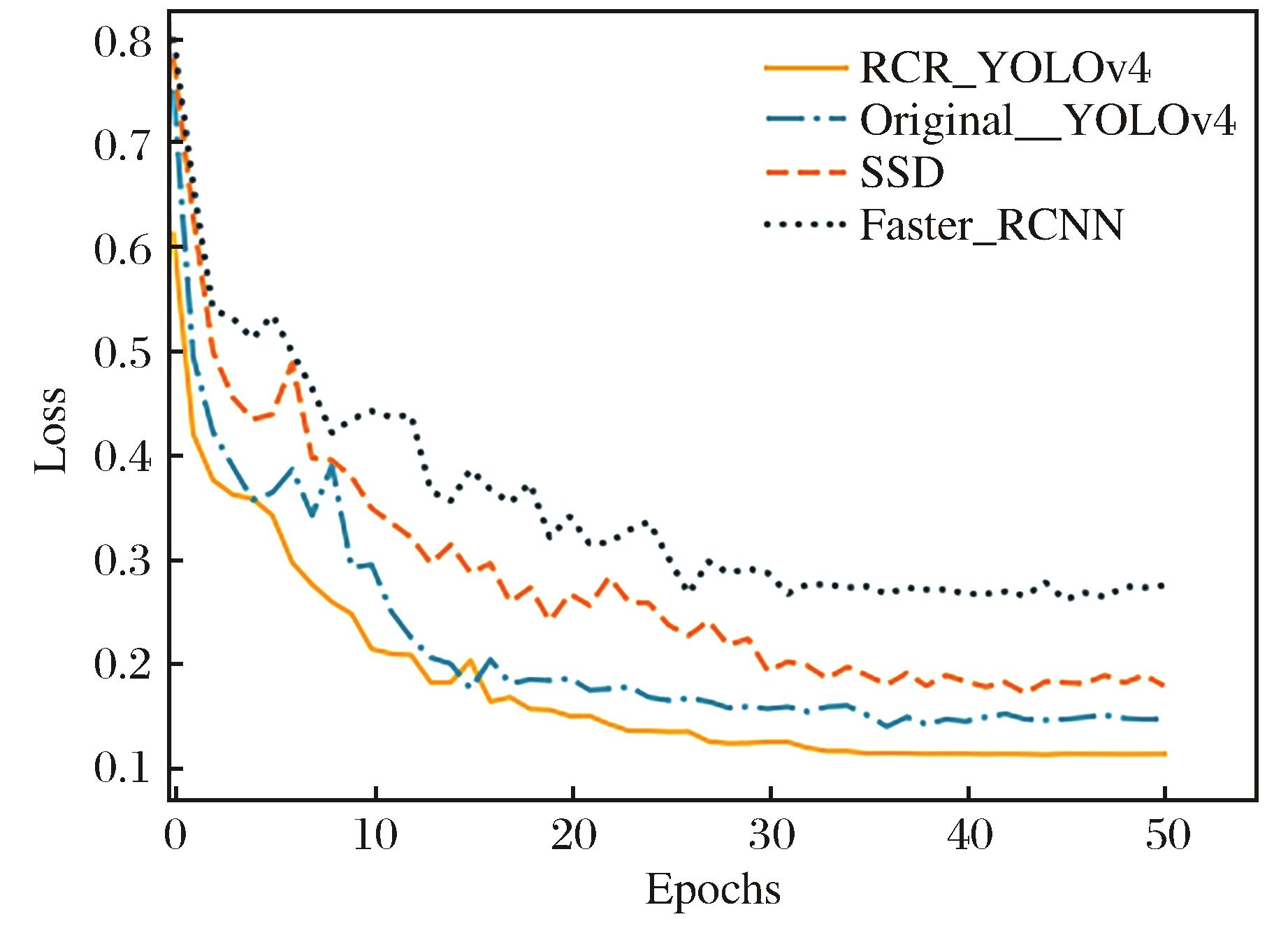
针对地下矿井巷道光线昏暗的道路上会出现落石或行人等行车障碍物,严重影响无人驾驶矿卡安全行驶的问题,提出了一种基于红外视觉识别的巷道障碍物快速检测优化模型RCR_YOLOv4。该模型利用K-Means++优化算法筛选巷道障碍物的先验框尺寸,并引入深度可分离卷积降低网络参数量和计算量,从而提高障碍目标的定位精度和检测效率。通过设计双通道注意力机制对网络特征融合模块进行优化,实现对无人矿卡行车障碍的高精度检测。结果表明,该目标检测模型对矿井道路障碍的检测准确率达到93.52%,检测速度达到60.6 FPS,能够为矿井巷道复杂环境下无人矿卡安全行驶提供保障。
中图分类号:
| Arthur D, Vassilvitskii S,2006.K-means++:The Advantages of Careful Seeding[M]. Palo Alto:Stanford InfoLab Publication. | |
| Bi Lin, Xie Wei, Cui Jun,2017.Identification research on the miner’s safety helmet wear based on convolutional neural network[J].Gold Science and Technology,25(4):73-80. | |
| Bochkovskiy A, Wang C Y, Liao H Y M,2020.Yolov4:Optimal speed and accuracy of object detection[J].arXiv,2004.10934. | |
|
Cao M C, Wang J M,2020.Obstacle detection for autonomous driving vehicles with multi-lidar sensor fusion[J].Journal of Dynamic Systems Measurement and Control,142(2):021007.DOI:10.1115/1.4045361 .
doi: 10.1115/1.4045361 |
|
| Chen Yi, Zhang Shuai, Wang Guiping,2020.Vehicle detection algorithm based on information fusion of LIDAR and camera[J].Machinery & Electronics,38(1):52-56. | |
| Cui Tiejun, Wang Lingxiao,2021.Research on application of YOLOv4 object detection algorithm in monitoring on masks wearing of coal miners[J].Journal of Safety and Technology,17(10):66-71. | |
| He K, Gkioxari G, Dollár P,et al,2017.Mask r-cnn[C]//IEEE International Conference on Computer Vision(ICCV) .Venice:IEEE: 2961-2969. | |
| He K, Zhang X, Ren S,et al,2016.Deep residual learning for image recognition[C]//IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Las Vegas:IEEE: 770-778. | |
| Howard A G, Zhu M, Chen B,et al,2017.Mobilenets:Efficient convolutional neural networks for mobile vision applications[J].arXiv,1704.04861. | |
| Li T P, Xu W H, Wang W,et al,2020.Obstacle detection in a field environment based on a convolutional neural network security[J].Enterprise Information Systems,16(3):472-493. | |
| Liu W, Anguelov D, Erhan D,et al,2016.Ssd:Single shot multibox detector[C]//European Conference on Computer Vision(ECCV).Amsterdam:IEEE: 21-37. | |
| Lu Caiwu, Qi Fan, Ruan Shunling,2020.An open-pit mine roadway obstacle warning method intergrating the object detection and distance threshold model[J].Opto-Electronic Engineering,47(1):40-47. | |
| Niu Lixia, Li Xiaomeng,2021.A new safety management model of intelligent mines in 5G era[J].China Safety Science Journal,31(6):29-36. | |
| Ren S Q, He K M, Girshick R,et al,2017.Faster r-cnn:Towards real-time object detection with region proposal networks[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,39(6):1137-1149. | |
| Ruan Shunling, Li Shaobo, Lu Caiwu,et al,2021.Road negative obstacle detection in open-pit mines based on multi scale feature fusion[J].Journal of China Coal Society,46(Supp.2):1-10. | |
| Wang Jinghua, Wang Liguan, Bi Lin,2021.Obstacle detection technology of mine electric locomotive driverless based on computer vision technology[J].Gold Science and Technology,29(1):136-146. | |
| Woo S, Park J, Lee J Y,et al,2018.Cbam:Convolutional block attention module[C]//European Conference on Computer Vision(ECCV).Munich:IEEE: 3-19. | |
| Zhang X Y, Zhou M, Qiu P,et al,2019.Radar and vision fusion for the real-time obstacle detection and identification[J].Industrial Robot,46(3):391-395. | |
| Zhao Liang, Hu Jie, Llu Han,et al,2021.Semantic segmentation based deep learning algorithm for 3D object detection from point clouds[J].Cinese Journal of Lasers,48(17):1-22. | |
| Zhong Y, Wang J, Peng J,et al,2020.Anchor box optimization for object detection[C]//IEEE/CVF Winter Conference on Applications of Computer Vision(WACV).Snowmass:IEEE: 1286-1294. | |
| 毕林,谢伟,崔君,2017.基于卷积神经网络的矿工安全帽佩戴识别研究[J].黄金科学技术,25(4):73-80. | |
| 陈毅,张帅,汪贵平,2020.基于激光雷达和摄像头信息融合的车辆检测算法[J].机械与电子,38(1):52-56. | |
| 崔铁军,王凌霄,2021.YOLOv4目标检测算法在煤矿工人口罩佩戴监测工作中的应用研究[J].中国安全生产科学技术,17(10):66-71. | |
| 卢才武,齐凡,阮顺领,2020.融合目标检测与距离阈值模型的露天矿行车障碍预警[J].光电工程,47(1):40-47. | |
| 牛莉霞,李肖萌,2021.5G时代智慧矿山安全管理新模式[J].中国安全科学学报,31(6):29-36. | |
| 阮顺领,李少博,卢才武,等,2021.多尺度特征融合的露天矿区道路负障碍检测[J].煤炭学报,46(增2):1-10. | |
| 王京华,王李管,毕林,2021.基于计算机视觉技术的矿井电机车无人驾驶障碍物检测技术[J].黄金科学技术,29(1):136-146. | |
| 赵亮,胡杰,刘汉,等,2021.基于语义分割的深度学习激光点云3D目标检测算法[J].中国激光,48(17):1-22. |
| [1] | 顾清华, 周琼, 王丹. 基于改进YOLOv8的露天矿区行车障碍物检测[J]. 黄金科学技术, 2024, 32(2): 345-355. |
| [2] | 顾清华, 杜艺凡, 李萍丰, 王丹. 基于加权双向特征融合的矿区道路落石检测[J]. 黄金科学技术, 2023, 31(6): 953-963. |
| [3] | 阮顺领,阮炎康,卢才武,顾清华. 基于红外图像的矿石传送带托辊异常检测[J]. 黄金科学技术, 2023, 31(1): 123-132. |
| [4] | 王鹏飞,毕林,王李管. 露天矿无人驾驶矿卡速度规划研究[J]. 黄金科学技术, 2022, 30(3): 460-469. |
| [5] | 王京华,王李管,毕林. 基于计算机视觉技术的矿井电机车无人驾驶障碍物检测技术[J]. 黄金科学技术, 2021, 29(1): 136-146. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000














 甘公网安备 62010202000672号
甘公网安备 62010202000672号