黄金科学技术 ›› 2023, Vol. 31 ›› Issue (1): 133-143.doi: 10.11872/j.issn.1005-2518.2023.01.106
孙越1( ),邹昀2(),康文宝1,王黎明3,贾智1
),邹昀2(),康文宝1,王黎明3,贾智1
Yue SUN1(),Yun ZOU2(),Wenbao KANG1,Liming WANG3,Zhi JIA1
摘要:
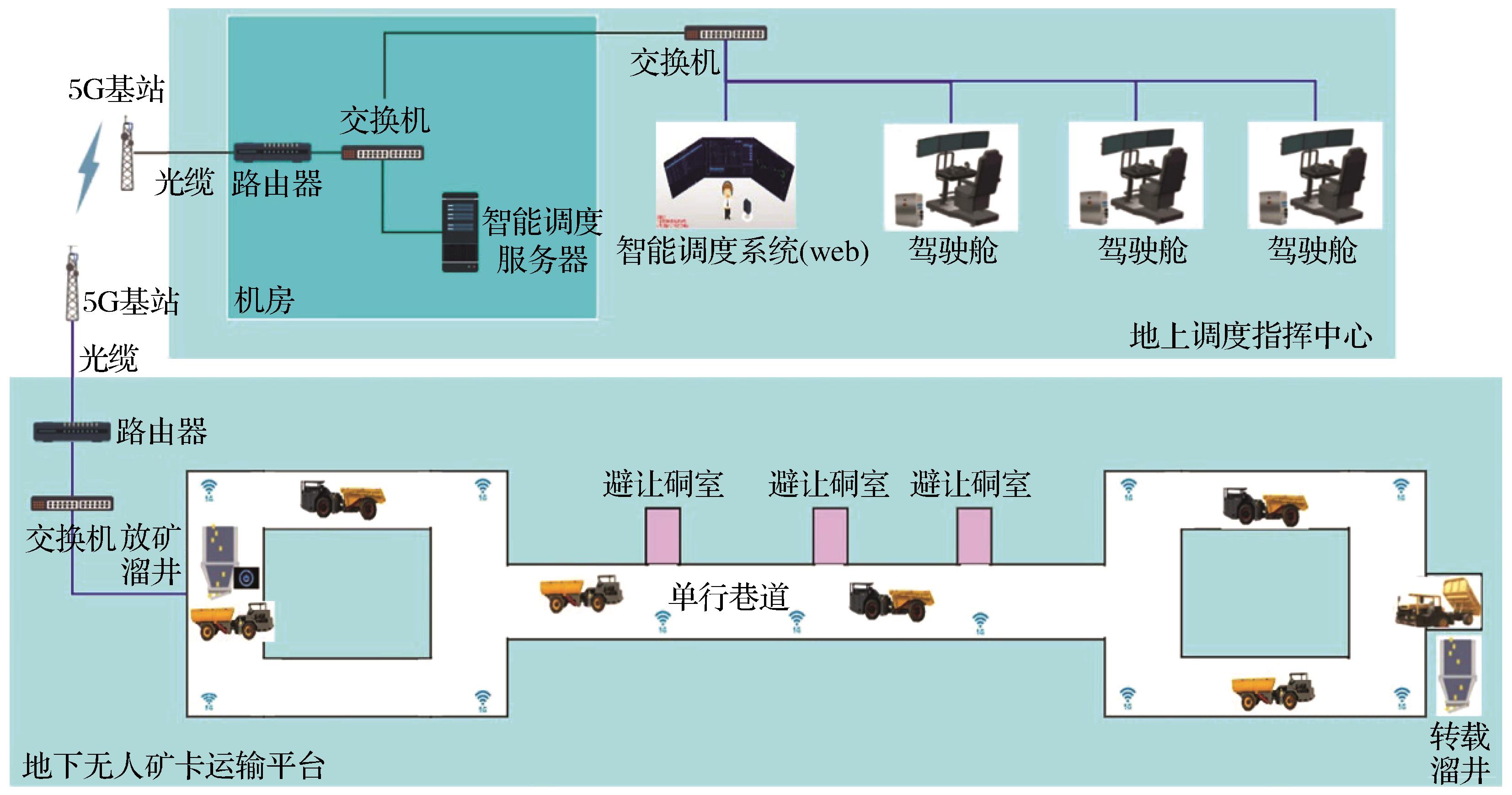
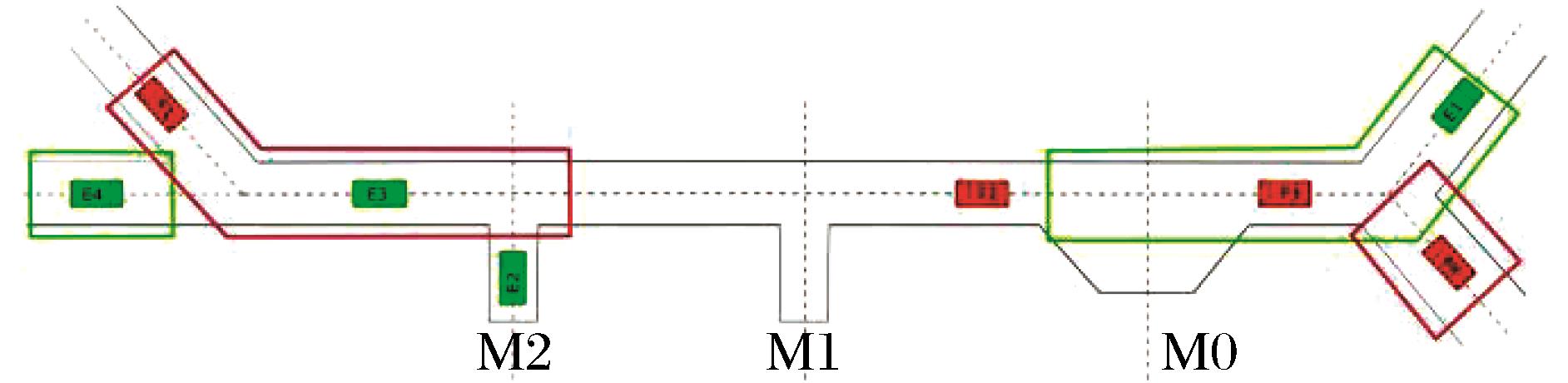
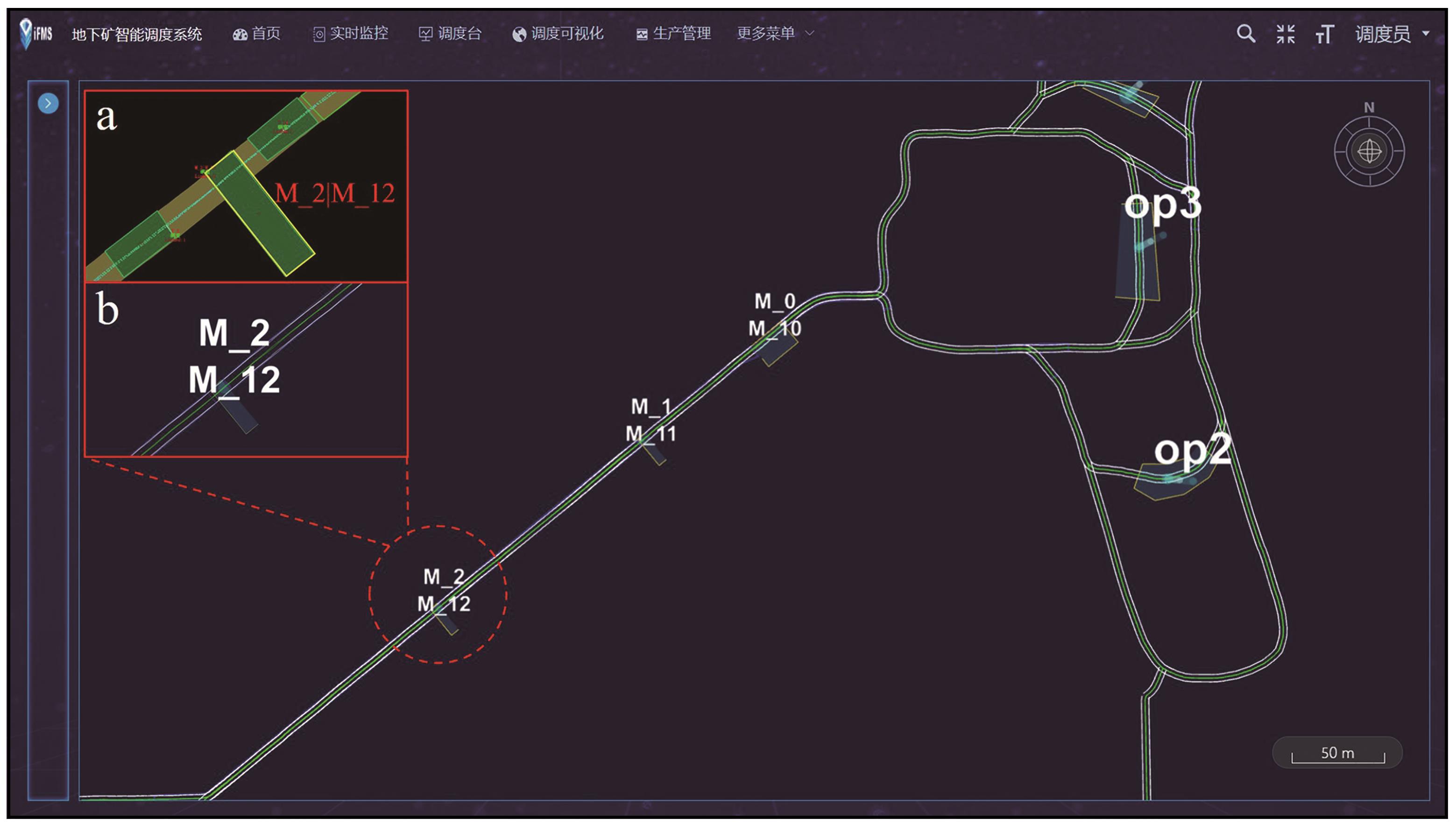
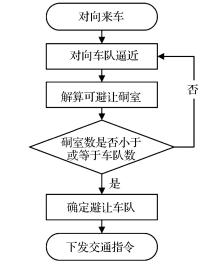
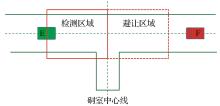
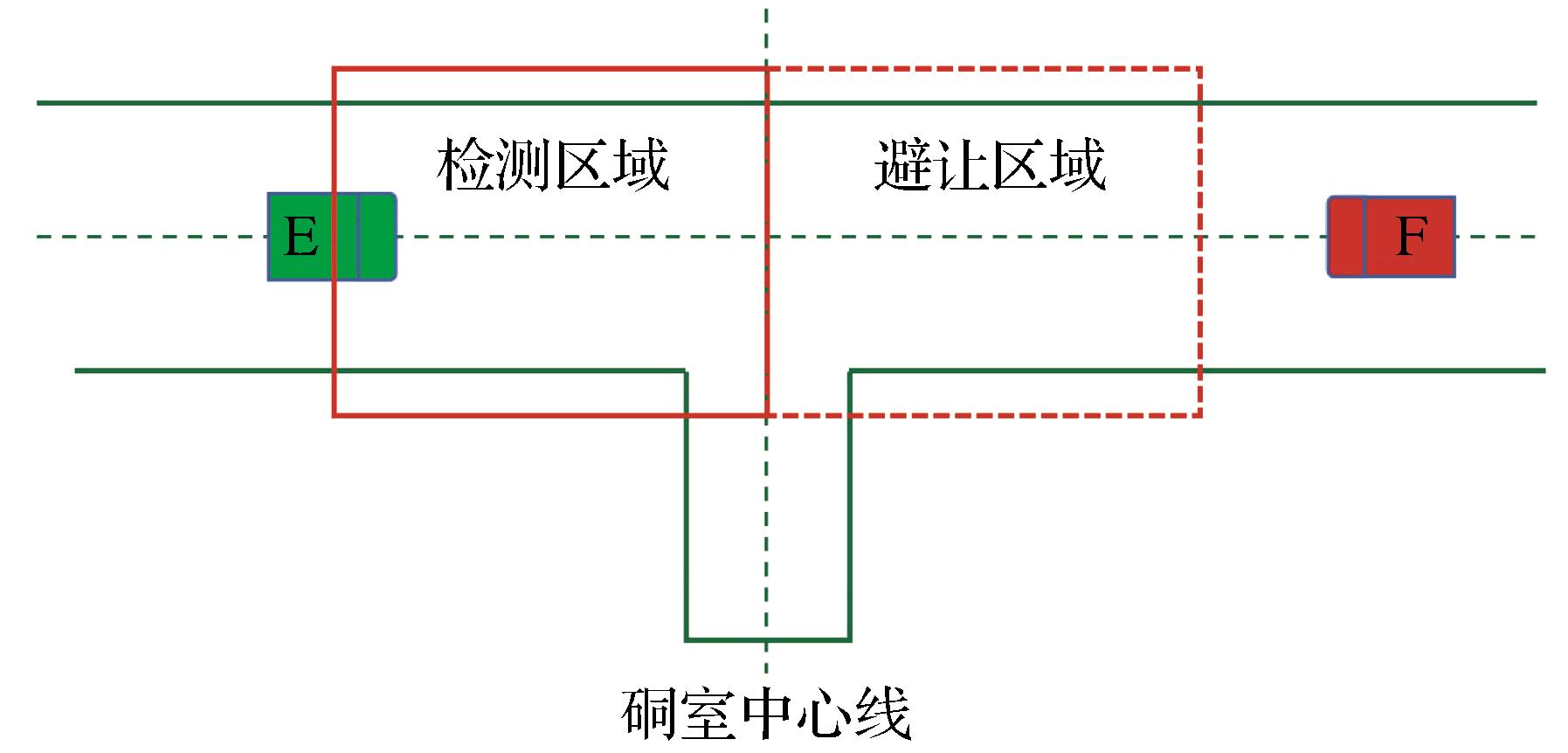
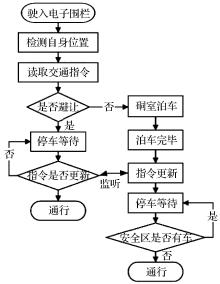
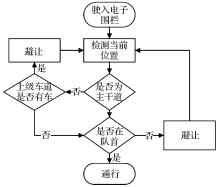
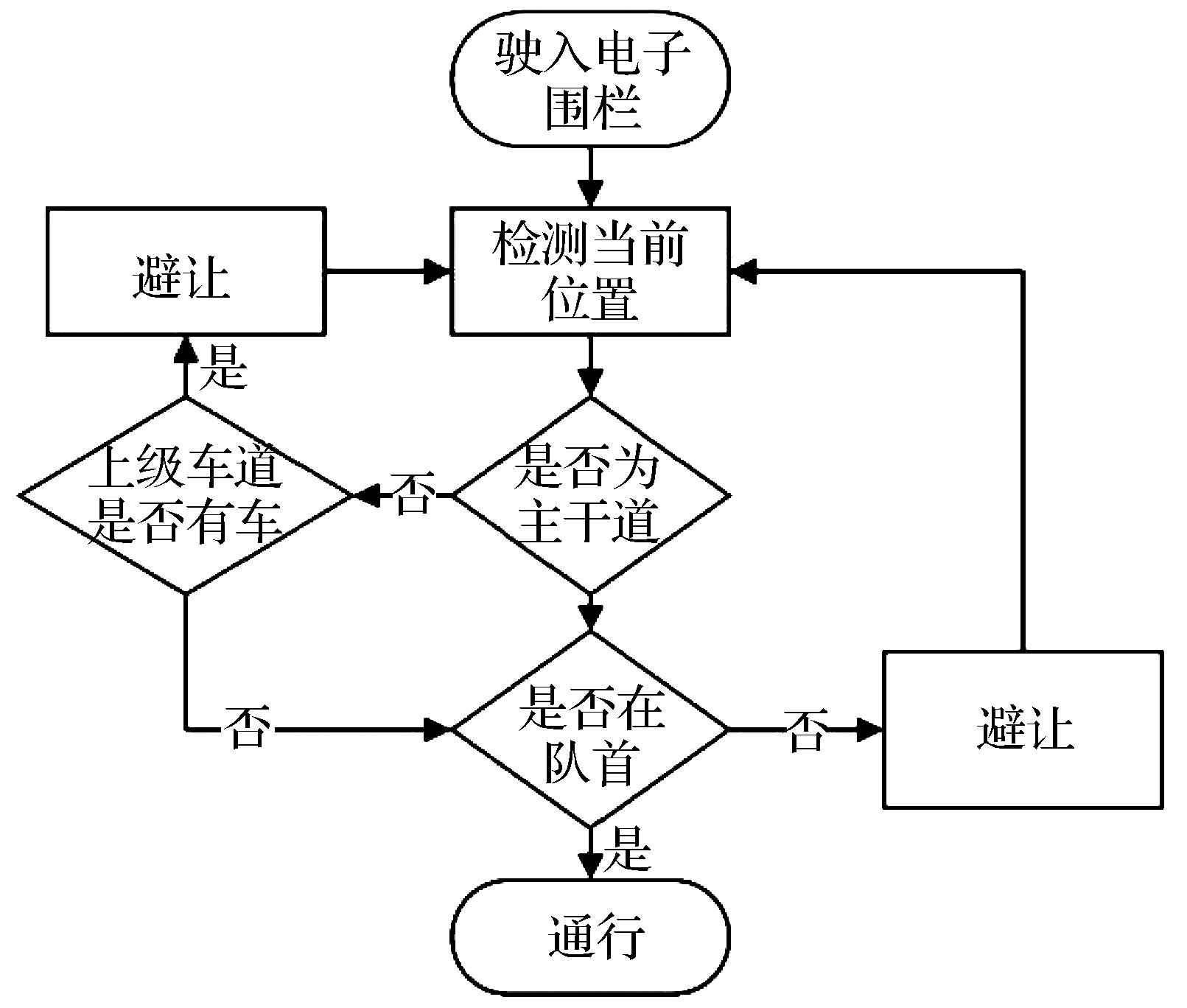
针对金川集团二矿区井下复杂环境会对作业人员健康及作业安全造成影响的问题,提出了一种地下无人矿卡智能调度系统整体框架及研究方案,介绍了基于SLAM的井下定位技术、5G信息传输和通信技术、用户交互技术、电子围栏技术和井下交通调度算法等系统功能及工作原理。通过激光雷达等传感器实现井下设备数据的收集和初步处理,利用光纤组网及5G无线网络完成数据实时传输,地表调度系统远程处理数据并下发各种调度决策,无人车辆根据调度决策执行相应指令。在不同生产场景下,通过对运输系统中的车辆进行实时检测和调度,以降低巷道拥堵时间,减少人员及设备安全事故的发生,从而提高生产运输效率,保障矿山企业经济平稳发展。
中图分类号:
| Bao Jiusheng, Zhang Muye, Ge Shirong,et al,2022.Underground driverless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm[J].Journal of China Coal Society,47(3):1347-1360. | |
| Bi Lin, Wang Liming, Duan Changming,2021.Research situation and development of high-precision positioning technology for underground mine environment [J].Gold Science and Technology,29(1):3-13. | |
| Chen Xiangmeng, Wang Enbiao, Wang Gang,2020.Research on electric locomotive self-driving technology in coal mine[J].Coal Science and Technology,48(Supp.2):159-164. | |
| Chen Xianzhong, Liu Rongjie, Zhang Sen,et al,2020.Development of millimeter wave radar imaging and SLAM in underground coal mine environment[J].Journal of China Coal Society,45(6):2182-2192. | |
| Chen Zhongqiang,2014.Study on Key Technologies of Underground Metal Ore Intelligent Scheduling[D].Changsha:Central South University. | |
| Dragt B J,2006.Modeling and Control of an Autonomous Un‐derground Vehicle[D].Pretoria:University of Pretoria. | |
| Gao Feng,2011.Study on the Design Method of Coalmine Underground Auxiliaryt Ransportation System and Intelligent Scheduling[D].Qingdao:Shandong University of Seience and Technology. | |
| Hui Ying, Xie Yingkun,2022.Application and development tendency of dockless bicycle-sharing geofence[J].Traffic and Transportation,38(2):89-94. | |
| Huo Zhenlong, Xiao Song, Meng Wei,et al,2022.R & D and demonstration application of key technologies and equipment of mine 5G wireless communication system[J].Journal of Intelligent Mine,3(4):55-60. | |
| Li Chaojin,2021.Automatic management and control system of underground mine ramp transportation[J].Railway Signalling and Communication Engineering,18(8):39-42. | |
| Li Fei, Dong Hui, Bu Shaocong,2021.Application of Beidou Positioning Technology in intelligent dispatching of conta-iner terminal[J].Port Science and Technology,(12):16-20. | |
| Li Tao, Liu Xu, Deng Shuai,et al,2018.Survey on underground wireless positioning system[J].Nonferrous Metals (Mining Section),70(5):91-94. | |
| Luo Weidong, Ma Baoquan, Meng Yu,et al,2020.Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC[J].Journal of China Coal Society,45(4):1536-1546. | |
| Ren Zhuli,2020.Research on the Key Technology of Autonomous Positioning and Navigation of Underground Mine Stope Scraper[D].Changsha:Central South University. | |
| Thrun S,2008.Simultaneous localization and mapping robotics and cognitive approaches to spatial mapping[C]//Springer Tracts in Advanced Robotics.Berlin Heidelberg:Springer-Verlag,38:13-41.. | |
| Wang Jinghua, Wang Liguan, Bi Lin,2021.Obstacle detection technology of mine electric locomotive driverless based on computer vision[J].Gold Science and Technology,29(1):136-146. | |
| Wei Shuangfeng, Pang Fan, Liu Zhenbin,et al,2020.Survey of LiDAR-based SLAM algorithm[J].Application Research of Computers,37(2):327-332. | |
| Wu Di,2019.Positioning Technology of LHD Based on Stereo Viusal Odometry[D].Beijing:University of Science and Technology Beijing. | |
| Wu Lihuo,2018.Deand implementation of vehicle avoidance system used for sloping ramp sign of Lilou iron mine[J].Mining Machinery,46(11):13-16. | |
| Wu Zhiguang, Luan Guiyong, Chen Xuehui,2020.Design and application of remote control of underground scraper based on 5G technology[J].Modern Mining,36(6):147-148,212. | |
| Xu Liang,2013.Based on IOT Intelligent Community Technology Application System[D].Shanghai:Fudan University. | |
| Xu Songhua,2007.Research on the Key Technology of Hazardous Materials Transport Monitor System[D].Beijing:Beijing Jiaotong University. | |
| Yin Guisheng,2013.Application on mine ramp trackless transportation signal control system[J].Copper Engineering,(4):55-57,85. | |
| Zhang Sheji, Yang Weiwei,2021.Application of ramp transportation security control system in Jinfeng gold mine[J].Gold,42(8):56-60. | |
| Zhang Yong, Zeng Guang, Deng Ao,et al,2021.Intelligent helmet system based on GPS+Beidou[J].Information System,(9):53-55. | |
| Zhou Bin, Tang Lijun, Liu Shisen,2022.Design of path planning for underground vehicle based on genetic algorithm[J].Coal Mine Machinery,43(1):23-26. | |
| 鲍久圣,张牧野,葛世荣,等,2022.基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划[J].煤炭学报,47(3):1347-1360. | |
| 毕林,王黎明,段长铭,2021.矿井环境高精定位技术研究现状与发展[J].黄金科学技术,29(1):3-13. | |
| 陈先中,刘荣杰,张森,等,2020.煤矿地下毫米波雷达点云成像与环境地图导航研究进展[J].煤炭学报,45(6):2182-2192. | |
| 陈相蒙,王恩标,王刚,2020.煤矿电机车无人驾驶技术研究[J].煤炭科学技术,48(增2):159-164. | |
| 陈忠强,2014.地下金属矿智能调度关键技术研究[D].长沙:中南大学. | |
| 高峰,2011.煤矿井下辅助运输系统设计方法与智能调度研究[D].青岛:山东科技大学. | |
| 惠英,解英堃,2022.共享单车电子围栏应用现状及发展前景[J].交通与运输,38(2):89-94. | |
| 霍振龙,肖松,孟玮,等,2022.矿井5G无线通信系统关键技术及装备研发与示范应用[J].智能矿山,3(4):55-60. | |
| 李朝金,2021.地下矿斜坡道运输自动化管控系统研究[J].铁路通信信号工程技术,18(8):39-42. | |
| 李飞,董辉,布少聪,2021.北斗定位技术在集装箱码头智能调度中的应用[J].港口科技,(12):16-20. | |
| 李涛,刘旭,邓帅,等,2018.井下无线定位系统综述[J].有色金属(矿山部分),70(5):91-94. | |
| 罗维东,马宝全,孟宇,等,2020.基于NMPC的地下无人铲运机反应式导航系统[J].煤炭学报,45(4):1536-1546. | |
| 任助理,2020.地下矿采场铲运机自主定位与导航关键技术研究[D].长沙:中南大学. | |
| 王京华,王李管,毕林,2021.基于计算机视觉技术的矿井电机车无人驾驶障碍物检测技术[J].黄金科学技术,29(1):136-146. | |
| 危双丰,庞帆,刘振彬,等,2020.基于激光雷达的同时定位与地图构建方法综述[J].计算机应用研究,37(2):327-332. | |
| 吴荻,2019.基于立体视觉里程计的地下铲运机定位技术研究[D].北京:北京科技大学. | |
| 吴立活,2018.李楼铁矿斜坡道车辆避让系统设计与实施[J].矿山机械,46(11):13-16. | |
| 吴智广,栾桂勇,陈学辉,2020.基于5G技术的井下铲运机远程控制设计与应用[J].现代矿业,36(6):147-148,212. | |
| 徐亮,2013.基于物联网技术应用的智慧社区应用系统实现[D].上海:复旦大学. | |
| 许松华,2007.危险货物运输监控系统关键技术研究[D].北京:北京交通大学. | |
| 殷贵生,2013.矿井斜坡道无轨运输信号控制系统应用[J].铜业工程,(4):55-57,85. | |
| 张社稷,杨巍巍,2021.斜坡道交通安全管控系统在锦丰金矿的应用[J].黄金,42(8):56-60. | |
| 张勇,曾光,邓奡,等,2021.基于GPS+北斗的智能安全帽系统[J].信息系统,(9):53-55. | |
| 周斌,唐丽均,刘世森,2022.基于遗传算法的井下车辆路径规划设计[J].煤矿机械,43(1):23-26. |
| [1] | 刘鑫, 王李管, 彭朝晖, 邹昀, 鲁芳. 地下矿卡智能调度与生产管理系统设计及应用[J]. 黄金科学技术, 2023, 31(4): 680-688. |
| [2] | 李杰林,杨承业,彭朝智,周科平,刘锐凯. 三维激光扫描技术在地下巷道岩体结构面识别的应用[J]. 黄金科学技术, 2021, 29(2): 236-244. |
| [3] | 毕林,王黎明,段长铭. 矿井环境高精定位技术研究现状与发展[J]. 黄金科学技术, 2021, 29(1): 3-13. |
| [4] | 毕林,段长铭,任助理. 基于RANSAC的地下矿山巷道边线检测算法[J]. 黄金科学技术, 2020, 28(1): 105-111. |
| [5] | 胡建华,徐朔寒,徐泽林,韩磊. 城市地下矿山采矿方法的数值与熵权耦合优选[J]. 黄金科学技术, 2019, 27(4): 513-521. |
| [6] | 刘定一, 王李管, 陈鑫, 钟德云, 徐志强. 地下矿中长期计划多目标优化及应用研究[J]. 黄金科学技术, 2018, 26(2): 228-233. |
| [7] | 聂兴信,张国丹. 基于熵值法—突变理论的地下矿山紧急避险系统可靠性研究[J]. 黄金科学技术, 2016, 24(6): 72-77. |
| [8] | 陈建宏,曾闵,李涛,江时雨. 基于物元分析—未确知测度理论的地下矿山安全避险“六大系统”可靠性评估方法[J]. 黄金科学技术, 2015, 23(1): 80-84. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000












 甘公网安备 62010202000672号
甘公网安备 62010202000672号