黄金科学技术 ›› 2023, Vol. 31 ›› Issue (2): 302-312.doi: 10.11872/j.issn.1005-2518.2023.02.149
刘卓1,2( ),贾明涛1,2,王李管1,2()
),贾明涛1,2,王李管1,2()
Zhuo LIU1,2(),Mingtao JIA1,2,Liguan WANG1,2()
摘要:
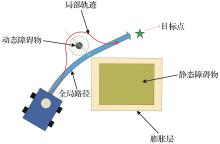
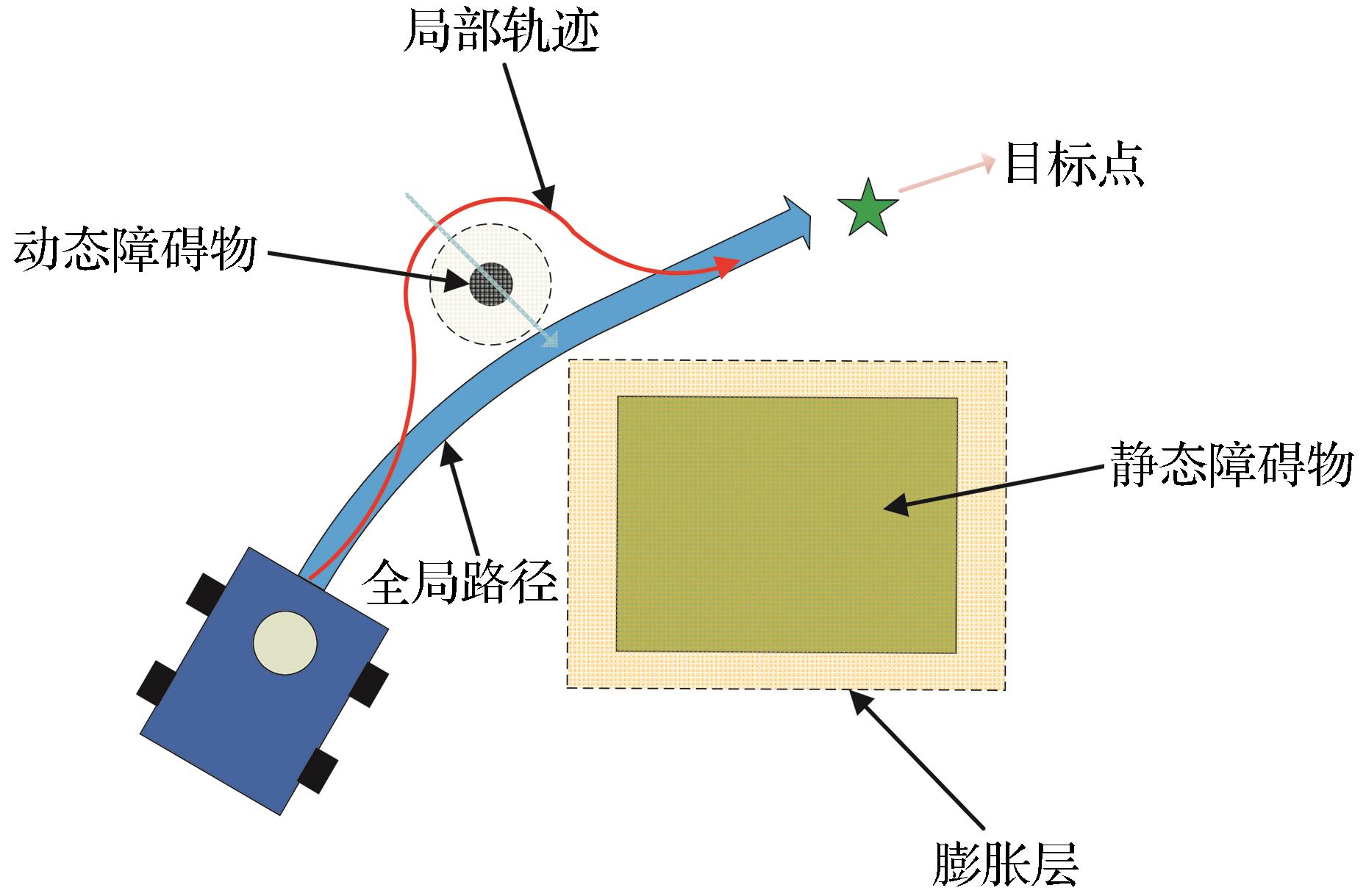
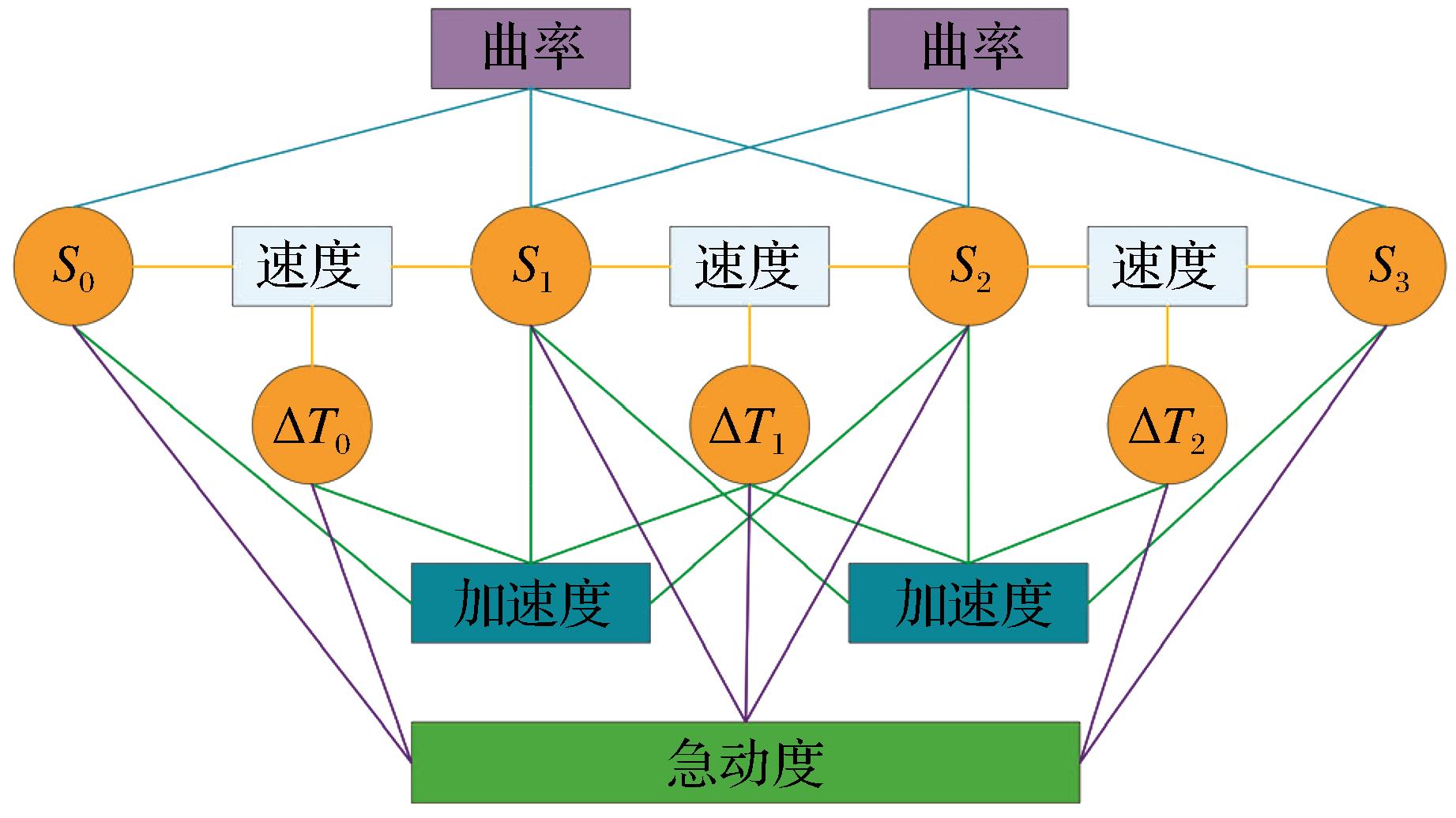
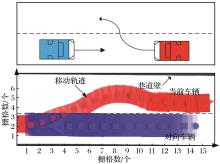
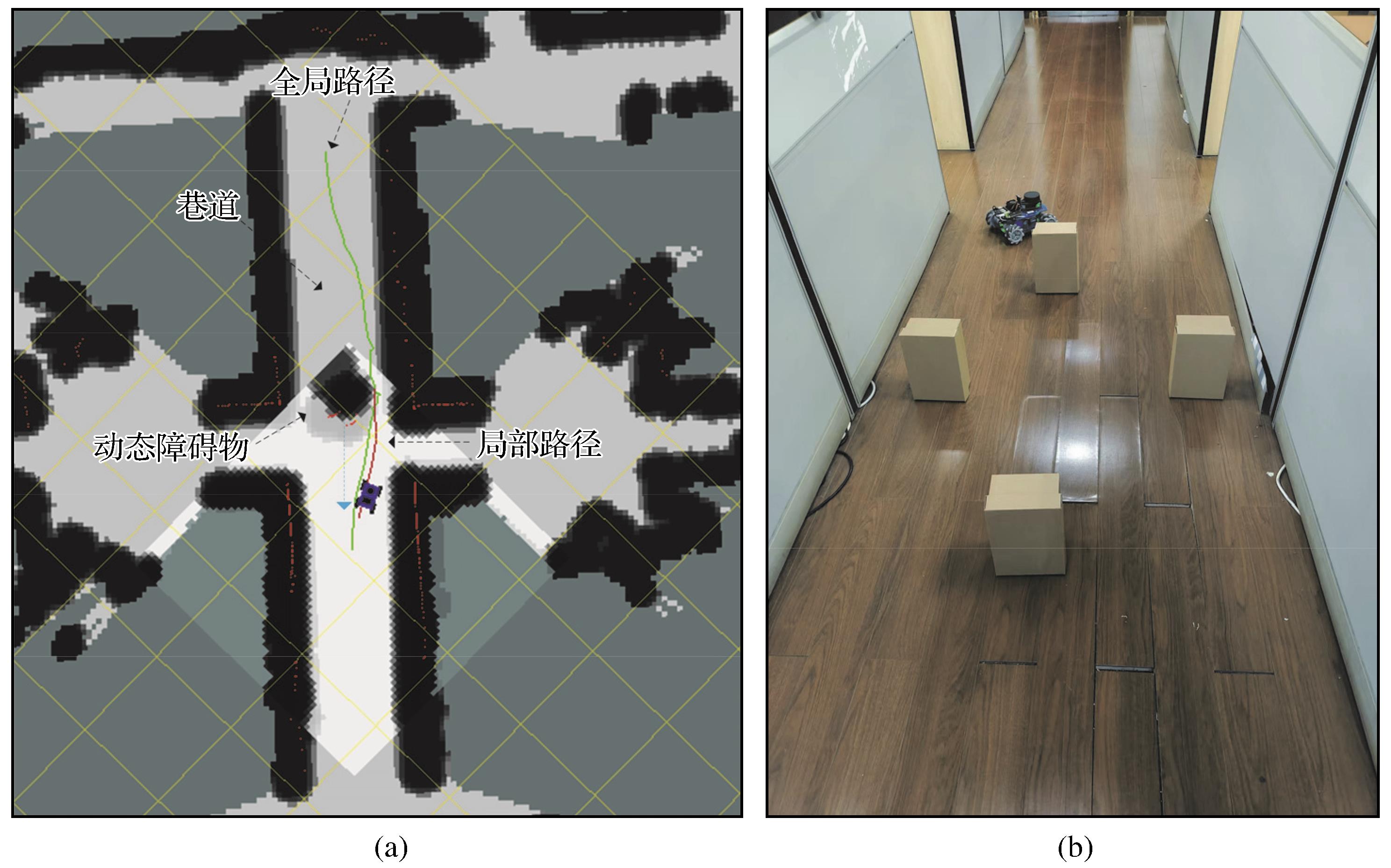
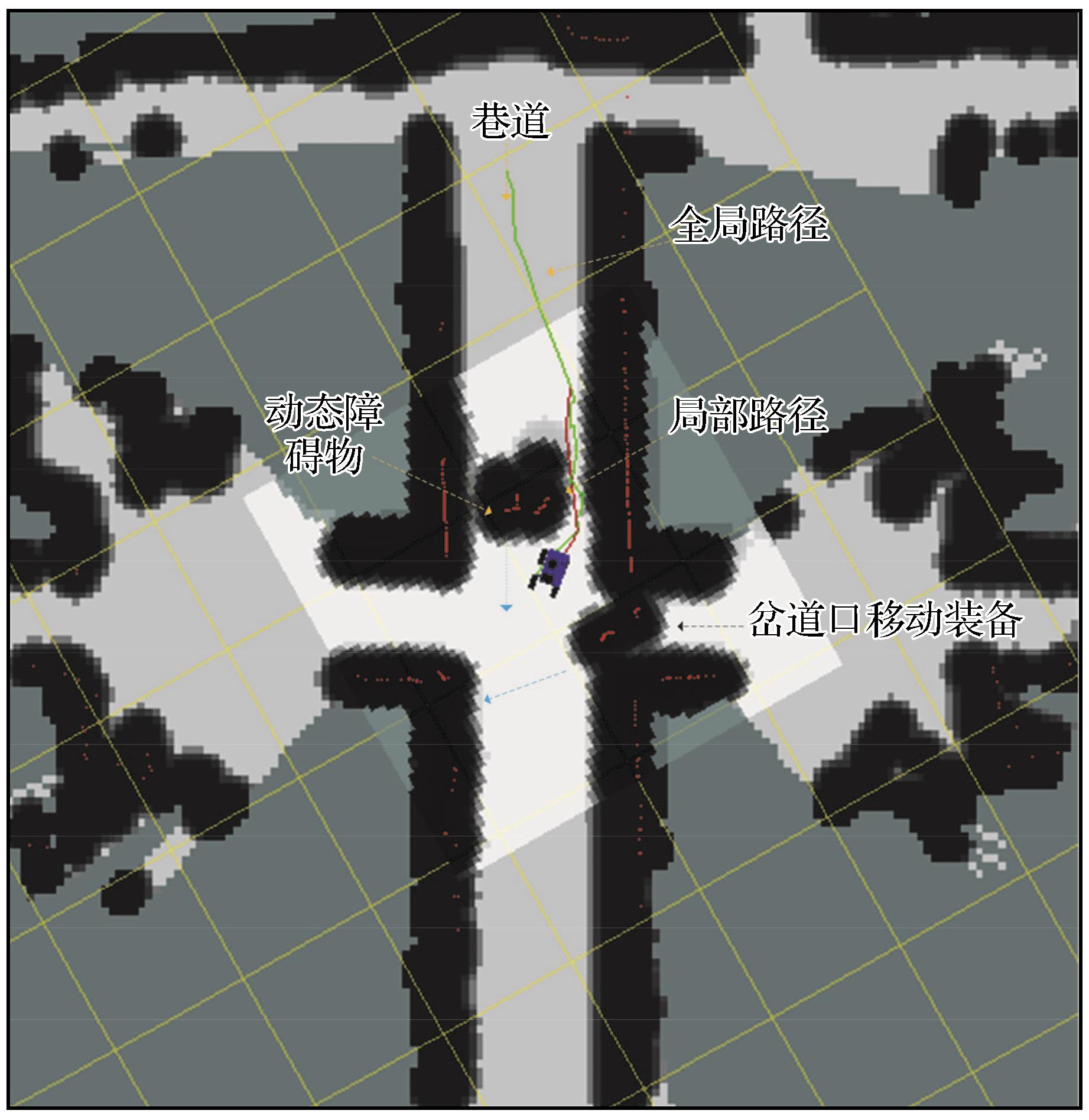
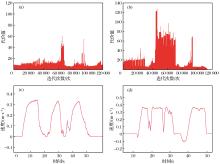
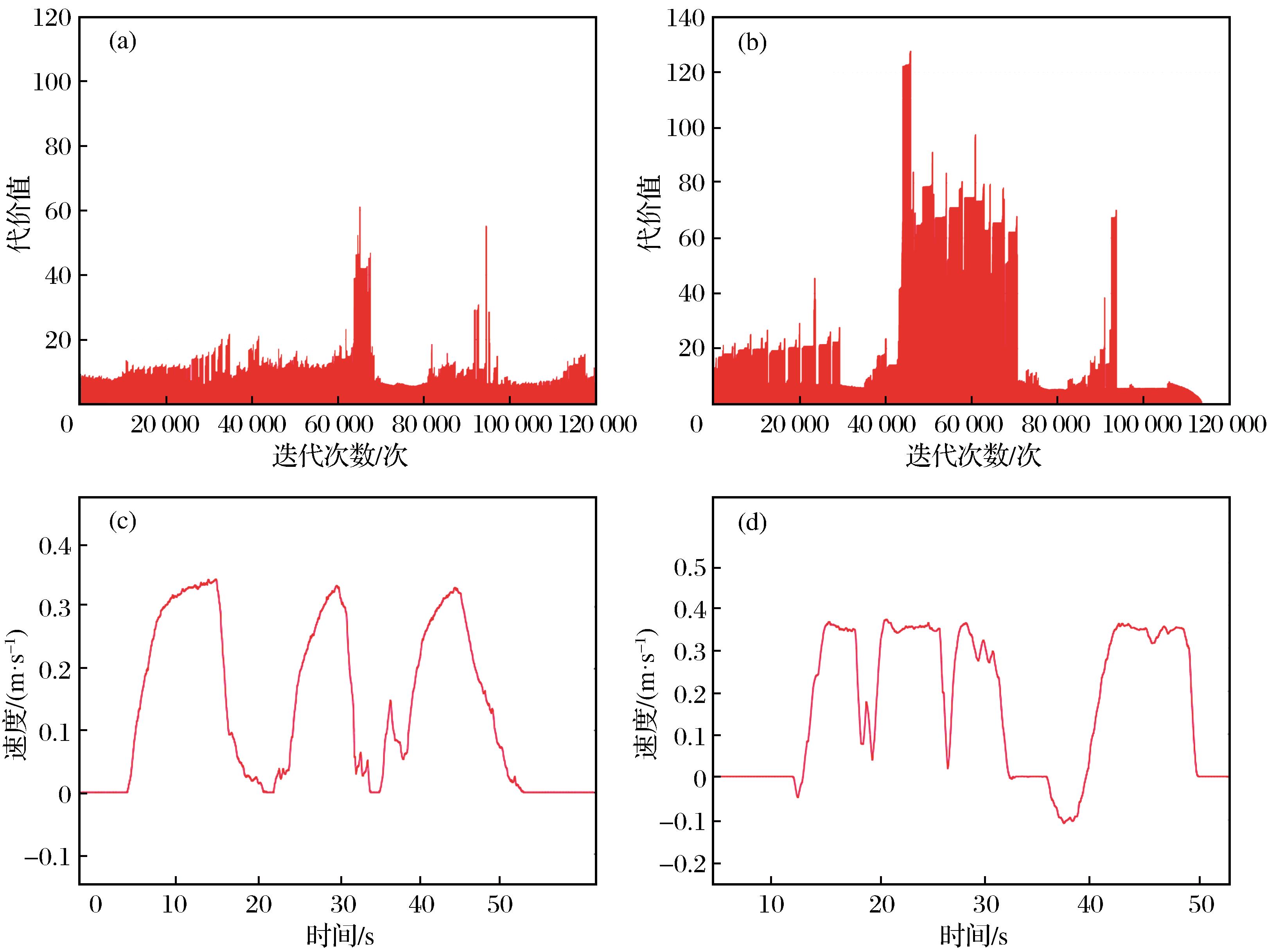
传统地下移动装备自主导航主要依靠预先建立的静态地图做出全局路径规划,在遇到突然出现的障碍物时容易产生振荡的轨迹,导致行驶路线无法被执行。为解决上述问题,提出了在全局路径规划的基础上增加改进TEB(Time Elastic Band)局部路径规划,并对TEB算法增加曲率约束、急动度约束、末端平缓约束和能耗约束,以适应地下巷道环境。试验结果表明:改进TEB算法产生了适应度更高的轨迹,有效地缩短了路径长度,降低了速度的跳变;优化后的路径平滑性得到提高,与目标点的偏差减小,并在运行效率方面比传统TEB路径规划有所提高,改进前的平均路径代价值为23.09,改进后的平均路径代价值为10.19,总体代价值降低了55.87%。
中图分类号:
| Bai Guoxing, Liu Li, Meng Yu,et al,2020.Real-time path tracking of mobile robot based on nonlinear model predictive control[J].Transactions of the Chinese Society for Agricultural Machinery,51(9):47-52,60. | |
| Bao Jiusheng, Zhang Muye, Ge Shirong,et al,2022.Underground driverless path planning of trackless rubber wheeler based on improved A* and artificial potential field algorithms[J].Journal of China Coal Society,47(3):1347-1360. | |
| Chen Jiting, Guo Chen, Liu Yi,2021.Path optimization method of mobile robot based on time elastic band[J].Science Technology and Engineering,21(26):11212-11219. | |
| Chen Meng, Wang Liguan, Jia Mingtao,et al,2013.An overview of autonomous navigation techniques and development trend for underground LHD[J].China Safety Science Journal,23(3):130-134. | |
| Chen Yimei, Shen Jianfeng, Li Bingqi,2022.Research on multi-robot dynamic obstacle avoidance strategy with improved TEB algorithm[J].Electro-Optic and Control,29(5):107-112. | |
|
Duff E S, Roberts J M, Corke P I,2003.Automation of an underground mining vehicle using reactive navigation and opportunistic localization[C]//Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat No 03CH37453),IEEEL,VegasLas,NV,USA.DOI:10.1109/IROS.2003.1249742 .
doi: 10.1109/IROS.2003.1249742 |
|
| Gao Zhiwei, Dai Xuewu, Zheng Zhida,2020.Optimal trajectory planning for energy consumption of mobile robots based on motion control and frequency domain analysis[J].Acta Automation Sinica,46(5):934-945. | |
| Jiang Yong, Jiang Zhi, Guo Xin,et al,2018.Autonomous navigation technology for underground unmanned vehicles based on genetic algorithm-backpropagation neural network [J].Machine Manufacturing,56(12):26-30. | |
|
Kummerle R, Grisetti G, Strasdat H,et al,2011.G2o:A general framework for graph optimization[C]//Proceedings of the 2011 IEEE International Conference on Robotics and Au-tomation,Shanghai,China.DOI:10.1109/ICRA.2011.597 9949 .
doi: 10.1109/ICRA.2011.597 9949 |
|
|
Larsson J, Broxvall M, Saffiotti A,2006.A navigation system for automated loaders in underground mines [C]// Proceedings of International Conference on Field and Service Robotics(FSR05) .DOI:10.1007/978-3-540-33453-8_12 .
doi: 10.1007/978-3-540-33453-8_12 |
|
|
Luo Weidong, Ma Baoquan, Meng Yu,et al,2020.Reactive navigation system of underground unmanned Load-Haul-Dump unit based on NMPC[J].Journal of China Coal Society,45(4):1536-1546.DOI:10.13225/j cnki.jccs/0385 .
doi: 10.13225/j cnki.jccs/0385 |
|
|
Ma T, Lv J, Guo M,2020.Downhole robot path planning based on improved D* algorithmn[C]// Proceedings of the 2020 IEEE International Conference on Signal Processing,Communications and Computing (ICSPCC).DOI:10.1109/ICSPCC50002.2020.9258532 .
doi: 10.1109/ICSPCC50002.2020.9258532 |
|
| Rösmann C, Feiten W, Wösch T,et al,2012.Trajectory modification considering dynamic constraints of autonomous robots[C]//Proceedings of the ROBOTIK 2012 7th German Conference on Robotics.Munich,Germany:VDE. | |
|
Rösmann C, Feiten W, Wösch T,et al,2013.Efficient trajectory optimization using a sparse model[C]//Proceedings of the 2013 European Conference on Mobile Robots,IEEE Barcelona,Spain.DOI:10.1109/ECMR.2013.6698833 .
doi: 10.1109/ECMR.2013.6698833 |
|
|
Rösmann C, Hoffmann F, Bertram T,2017.Kinodynamic trajectory optimization and control for car-like robots[C]//Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE Vancouver,BC,Canada.DOI:10.1109/IROS.2017.8206458 .
doi: 10.1109/IROS.2017.8206458 |
|
|
Smith J S, Xu R, Vela P,2020.Egoteb:Egocentric,perception space navigation using timed-elastic-bands[C]//Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA),IEEE,Paris,France.DOI:10.1109/ICRA40945.2020.9196721 .
doi: 10.1109/ICRA40945.2020.9196721 |
|
| Wang H, Li G, Hou J,et al,2022.A path planning method for underground intelligent vehicles based on an improved RRT* algorithm[J].Electronics,11(3):294.. | |
| Yang Chao, Chen Shuxin, Liu Li,et al,2011.Reactive navigation for underground autonomous scraper[J].Journal of China Coal Society,36( 11):1943 -1948. | |
| Yang Yiting,2022.Optimal motion trajectory planning method for energy consumption of two-wheel self-balancing mobile robot[J].Journal of Lanzhou University of Arts and Sciences (Natural Science Edition),36(1):59-63. | |
|
Zhang Y Z, Ma B, Wai C K,2018.A practical study of time-elastic-band planning method for driverless vehicle for auto-parking[C]//Proceedings of the 2018 International Conference on Intelligent Autonomous Systems(ICoIAS),IEEE,Singapore.DOI:10.1109/ICoLAS.2018.8494025 .
doi: 10.1109/ICoLAS.2018.8494025 |
|
| 白国星,刘丽,孟宇,等,2020.基于非线性模型预测控制的移动机器人实时路径跟踪[J].农业机械学报,51(9):47-52,60. | |
| 鲍久圣,张牧野,葛世荣,等,2022.基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划 [J].煤炭学报,47(3):1347-1360. | |
| 陈纪廷,郭晨,刘毅,2021.基于时间弹性带的移动机器人路径优化方法[J].科学技术与工程,21(26):11212-11219. | |
| 陈盟,王李管,贾明涛,等,2013.地下铲运机自主导航研究现状及发展趋势[J].中国安全科学学报,23(3):130-134. | |
| 陈奕梅,沈建峰,李柄棋,2022.改进TEB算法的多机器人动态避障策略研究[J].电光与控制,29(5):107-112. | |
| 高志伟,代学武,郑志达,2020.基于运动控制和频域分析的移动机器人能耗最优轨迹规划[J].自动化学报,46(5):934-945. | |
| 姜勇,姜智,郭鑫,等,2018.基于遗传算法—反向传播神经网络的地下无人驾驶车辆自主导航技术[J].机械制造,56(12):26-30. | |
| 罗维东,马宝全,孟宇,等,2020.基于NMPC的地下无人铲运机反应式导航系统[J].煤炭学报,45(4):1536-1546. | |
| 杨超,陈树新,刘立,等,2011.反应式导航在地下自主行驶铲运机中的应用[J].煤炭学报,36(11):1943-1948. | |
| 杨怡婷,2022.两轮自平衡可移动机器人能耗最优运动轨迹规划方法[J].兰州文理学院学报(自然科学版),36(1):59-63. |
| [1] | 公凡波,毕林. 露天矿电铲铲装移动轨迹规划研究[J]. 黄金科学技术, 2021, 29(1): 43-52. |
|
||
©2018 黄金科学技术编辑部
电话:0931-8277791
E-mail: hjkx@lzb.ac.cn 邮编:730000





 甘公网安备 62010202000672号
甘公网安备 62010202000672号