


自然崩落法是依靠重力和构造应力实现矿(岩)体自然冒落的大规模地下采矿方法(Coates,1981;沈南山等,2009),具有生产成本低、产能大以及工艺流程相对简单等优点,在国内外矿山领域得到了成功应用(唐业茂等,2010;Woo et al.,2013;朱忠华等,2015,2019;曹永,2023)。采用自然崩落法进行开采时,随着矿山生产的进行,地表不可避免地产生沉陷和坍塌,进而引发次生灾害。因此,对地表塌陷进行有效监测,科学分析和掌握塌陷规律,对放矿计划和地表治理具有重要意义。
现阶段矿山地表测量与监测突破了传统大地测量法,主要方法有测量机器人(肖维等,2023)、全球导航卫星系统(Bian et al.,2014)、遥感法、激光雷达测量方法(Zheng et al.,2022)、合成孔径雷达干涉测量(Chen et al.,2021)和摄影测量方法等。测量机器人通过内置马达和CCD布阵传感器对固定于地表的棱镜自动搜索识别目标进行测量(吴飞等,2023),易于观测作业自动化,有利于形成连续观测数据(杨晓玉,2016),但对通视要求很高,且价格昂贵(宋许根等,2018)。遥感法通常与全球导航卫星系统(GNSS)和地理信息系统(GIS)进行系统集成,具有作业周期短和自动化程度高等优点,但受信号和噪声影响较大。激光雷达测量方法(LIDAR)通过将激光雷达设备集成在无人机上或固定在地表特定点(邓博等,2024),对地面进行扫描,可以部分穿透树林遮挡(张亚红,2023),但无法穿透雾霾和水体,且对于站式三维激光扫描仪,还存在“灯下黑”现象和数据缺失的情况。合成孔径雷达干涉测量(InSAR)是利用合成孔径雷达(SAR)对相同地区拍摄2幅影像,经过干涉获得该区域的干涉条纹图,干涉条纹图中则包含该区域的地形信息。InSAR具有监测精度高、抗相位误差干扰以及揭示监测目标时序形变规律等优点(张文龙等,2022),但对于一些变化较大的观测物,存在数据量巨大,不利于数据分析的问题。
数字摄影测量监测塌陷是通过对目标全时段进行拍照取样,通过相片像素点变换的方法,进行塌陷分析(李寒冰等,2022)。无人机航测方法(本文指倾斜摄影测量技术)是通过在同一飞行平台上搭载多台传感器(目前常用的是五镜头相机),同时从垂直、倾斜等不同角度采集影像,实时完整地获取地面物体的准确信息,对测区进行拍摄监测。
本文研究对象是自然崩落法开采诱发的地表塌陷,由于地表塌陷面积较大,塌陷区内有塌陷坑和松散坡体,且塌陷区呈动态发展态势,因此作业人员难以进入塌陷区。经过分析,传统测量方法存在安全隐患,测量机器人和激光雷达测量存在“灯下黑”现象且价格昂贵,全球导航卫星系统和遥感法的精度并不适用于高海拔塌陷分析,而合成孔径雷达干涉测量方法仅适用于地铁或城市等精密沉降监测。无人机航测方法作为一种非接触式测量方式,具有安全性好、作业流程简单及精度较高等优势,适用于较大面积复杂地表监测。因此,本文采用无人机航测进行远程监测,研究自然崩落法开采诱发的地表塌陷问题,分析塌陷规律,以期为放矿生产和地表治理提供科学依据。
1 无人机航测原理及技术流程
1.1 无人机航测原理
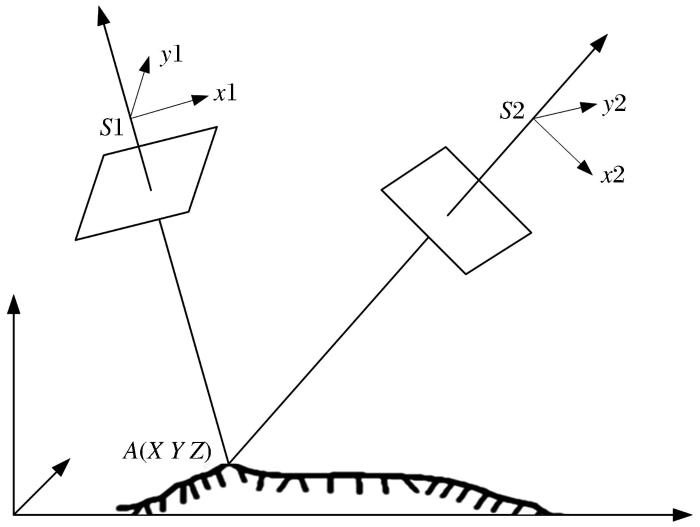
无人机航测(本文指倾斜摄影测量航测方式)利用相机在空中不同拍摄点的多个坐标点信息进行交会计算,得出地面点的坐标,该过程称为空中三角测量,主要是用光束法进行平差计算。以一张相片代表一束光作为平差单元,基于共线方程进行求解,得出每个像素的内外方位元素和相应的地面坐标。空中三角测量示意图如图1所示。共线方程可表示为
式中:主点坐标为(
图1
自然崩落法开采地表塌陷无人机航测需要注意以下几点:(1)数据采集。因拉底放矿,暴露面水力半径增大,引发未崩通区域矿岩逐渐崩落,而崩通区地表逐渐塌陷,导致作业人员无法进入塌陷区进行测量。外业采集数据只能通过在测区外围设立GNSS RTK像控点进行定位,从而保证整体航测精度(查剑锋等,2023)。(2)多视影像联合平差。因为矿区航测中存在部分塌陷坑被地面阴影遮挡的情况,因此航测时需要充分考虑影像间相互遮挡关系的方位元素和空间景物变形等因素,故利用自由网光束法(张春森等,2017)进行同名点平差,进而采用金字塔匹配(全斌等,2010)进行分级同名点匹配。(3)多视影像密集匹配。由于测区海拔变化大,航拍过程中需进行一定多余观测,造成大量的冗余观测。多视影像密集匹配(全昌文等,2023)可对盲区进行补空,缩短观测周期,形成三维网格。(4)精度检验。该测区像控点分布与传统航测并不相同,主要分布在测区四周,而在测区中心塌陷区域分布较少,因此航测过程中需要关注模型整体精度评定的问题(李涛,2017)。
1.2 技术流程
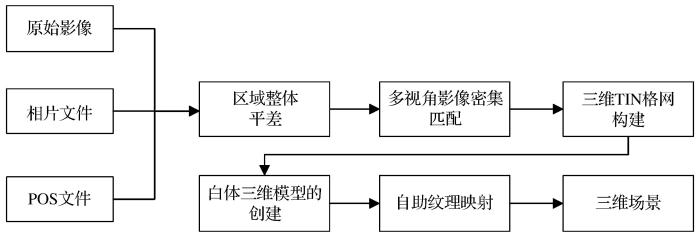
无人机航测技术流程如图2所示,其中影像和各类文件的获取属于无人机外业采集的过程。对所获得的数据进行平差处理,进而进行稠密重建,并基于Delaunay三角化构建TIN网格,最后利用RGB进行纹理映射,得到实景模型。
图2
2 基于无人机航测的普朗铜矿地表塌陷三维建模
2.1 普朗铜矿采矿地表塌陷机理及开采工艺流程
普朗铜矿位于云南省迪庆藏族自治州香格里拉市北东部,是目前国内最大的地下铜矿山,也是5G应用示范矿山和智能矿山典范。该矿山采用自然崩落法进行开采,出矿水平为3720水平,矿区地势北高南低,地表高程从3 850
图3

图3
2023年6月底普朗铜矿地表塌陷区
Fig.3
Surface subsidence area of Pulang copper mine at the end of June 2023
自然崩落法是在拉底水平形成拉底空间后,矿(岩)体依靠自然节理裂隙或人工致裂产生的裂隙,在重力和应力作用下实现自然冒落的崩落采矿方法。该方法的采矿工艺流程包括矿床开拓、采准、切割拉底和放矿4个步骤。矿床开拓是为了形成主运输(提升)、通风、供排水、供风及动力供应系统,开拓工程应在采准之前完成。采准工作是在矿床完成开拓的部分掘进采准和切割巷道,在采区(矿块)内形成行人、凿岩、放矿和通风等条件。切割拉底主要通过在切割平巷和拉底巷道打上向扇形孔进行爆破工作,目的是为大规模拉底和回采开辟自由面和补偿空间。放矿是在完成切割和拉底工作的位置进行大量出矿,随着矿石从放矿点放出,崩落矿岩逐渐向下移动,并诱发上部矿(岩)体持续崩落,直至崩通地表,并在地表形成塌陷区。
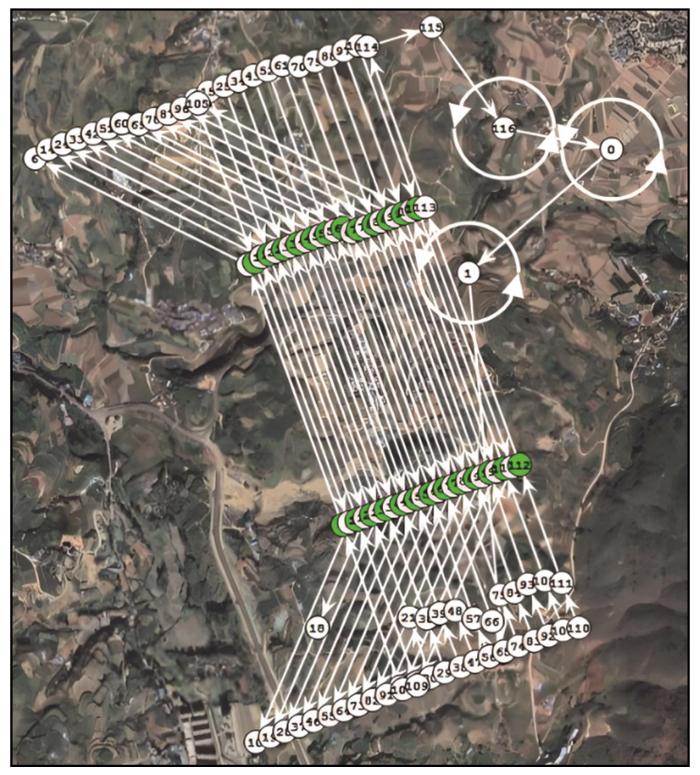
2.2 无人机航测控制点布设与航线设计
根据摄影测量规范和矿山实际情况,地面相控点布设从每个分区西北角布起,范围线附近的像控点应超出或接近范围线,以保证能够控制整个测区,分区内部的像控点按100~150 m间距进行布设,且尽量形成三角网,以确保测区接边的精度。检查点均匀布设在测区内,检查点的个数为像控点总个数的10%。像控点需满足以下条件:(1)由于矿场场景特征不明显,像控点位目标应清晰;(2)像控点用喷漆或白色石灰布成“L”状,且观测时均取外顶角;(3)每个像控点均需有相应远近照片对应,以避免混淆。
图4

图5

图6
2.3 普朗铜矿地表实景模型搭建
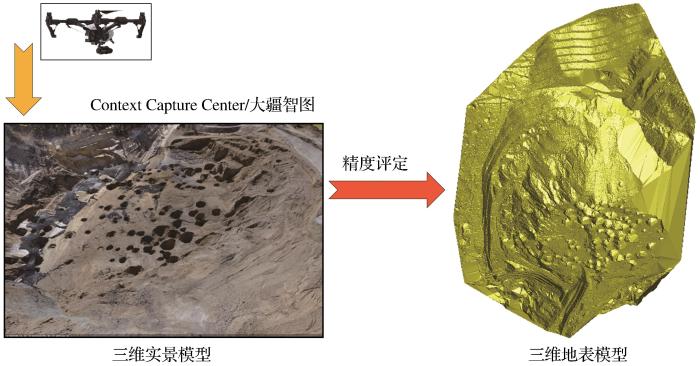
利用外业采集到的航片及相关数据进行内业模型制作,搭建普朗铜矿地表1∶500实景模型。飞马无人机将相片与pos分别记录和存储,并非将pos写入相片中,故需要剔除不合理和废弃的相片和pos,将相片与pos对应起来。地表设置13个像控点,空中三角测量完成后,依次根据像控点进行刺点,重新进行空中三角解算。为保证模型的质量和效果,本项目采用Context Capture Center和大疆智图2款软件分别进行建模,对比2组模型塌陷区影像空洞和模型变形拉花等问题,最终选取模型表现较好的一组。
2.4 模型精度分析与三维建模
完成实景模型后,对三维模型的整体精度进行评定,主要是将参与空中三角测量加密的实测控制点坐标与实际三维模型量测的对应点坐标求取中误差。通过n个控制点的坐标作为真值,在三维模型上量测相对应点的三维坐标。通过对比分析,得到 X、Y、Z方向的残差值,通过计算得到平面中误差和高程中误差,可分别表示为
式中:
在摄影测量中,往往是通过中误差值来评定消费级无人机倾斜摄影测量实景三维模型的精度。依据相关规范(国家测绘地理信息局,2013)对三维模型产品的平面中误差标准和高程中误差标准的规定,在1∶500比例尺中平面精度要优于3
表1 普朗铜矿地表监测检查点高程与平面定位精度
Table 1
| 检查点编号 | Dx/cm | Dy/cm | Dz/cm |
|---|---|---|---|
| Pt0 | -0.9088 | -2.7128 | 3.2440 |
| Pt1 | 1.2629 | 0.3161 | 1.3058 |
| Pt2 | -1.3778 | 1.7679 | -0.6247 |
| Pt3 | 0.0986 | -1.3656 | 1.3926 |
| Pt4 | 0.4471 | -1.3615 | 0.4562 |
| Pt5 | -2.9097 | -1.3615 | 2.1513 |
| Pt6 | 1.0753 | -0.1369 | -2.1694 |
| Pt7 | -0.2191 | -3.7132 | 0.5928 |
| Pt8 | 0.0333 | 0.4044 | 2.0000 |
| Pt10 | -0.1049 | 2.0767 | -1.6271 |
| Pt11 | 4.0755 | 3.3975 | -1.4745 |
基于普朗铜矿地表1∶500比例尺实景模型搭建,得到符合精度标准的osgb或obj格式的模型,进而对模型进行预处理,并将预处理后的模型导入Context Capture Center软件生成DOM正射影像图产品,通过DOM生成DLG数字线划图。将生成的DWG导入Dimine软件,基于等高线生成三维地表模型,完成表面模型重建,如图7所示。
图7
3 基于三维模型的普朗铜矿地表塌陷分析
3.1 塌陷影响区范围分析
基于无人机航测数据建立普朗铜矿地表塌陷三维模型(2022年3月28日至2023年3月22日),其中2022年3月28日和2023年3月22日塌陷影响区三维模型分别如图8(a)和图8(b)所示。由图8可知,普朗铜矿塌陷地表中心为明显的塌陷坑,将其边界提取得到塌陷坑边界线,塌陷坑四周往外依次划分为沉陷区和松动区,塌陷程度逐渐减弱,沉陷区和松动区无明显分界线;塌陷坑、沉陷区和松动区共同组成地表塌陷影响区。根据现有文献(余学义等,2010),地表破坏程度可划分为A、B、C级,其沉陷临界值分别为0.1,0.5,1.5 m。将普朗铜矿地表沉陷值0.1 m和破坏程度A级的边界进行提取,作为松动区范围线,即塌陷影响区范围线。基于此,在三维模型的基础上,得到各时期的塌陷影响区范围线,如图9所示,从里往外分别是2022年3月28日至2023年3月22日对应各时期的塌陷影响区范围线。
图8
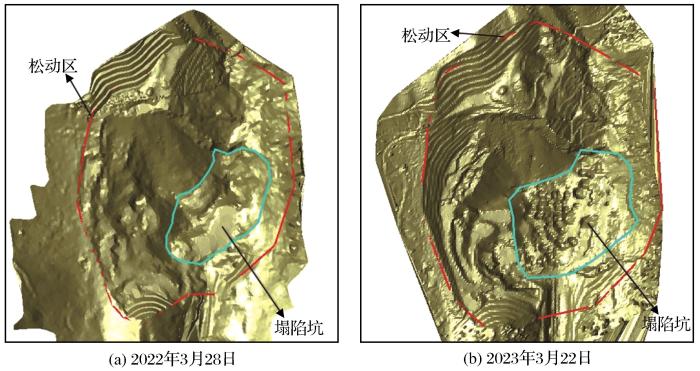
图9
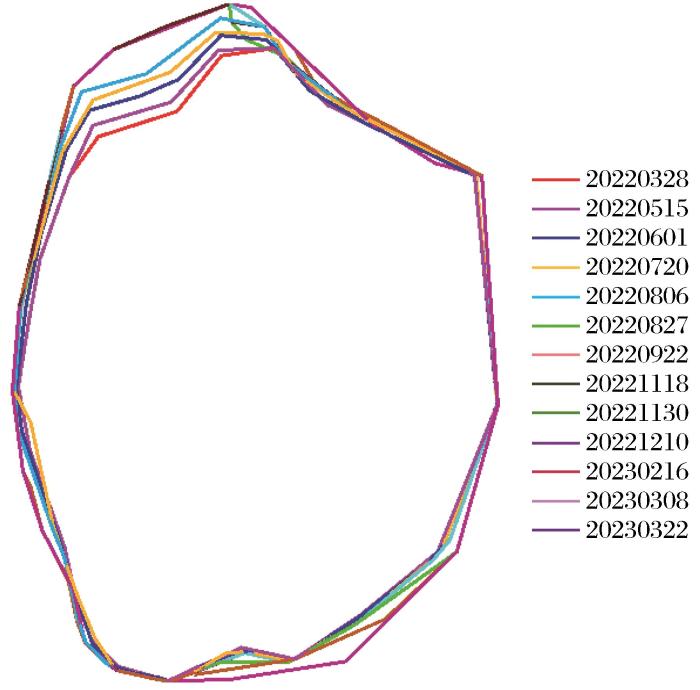
图9
塌陷影响区范围线(2022年3月28日至2023年3月22日)
Fig.9
Range line of subsidence impact area (from March 28,2022 to March 22,2023)
由图8和图9分析得出,2022年3月28日至2023年3月22日,普朗铜矿地表塌陷坑和塌陷影响区逐步扩大,塌陷坑面积从71 521
3.2 塌陷区剖面数据分析
图10
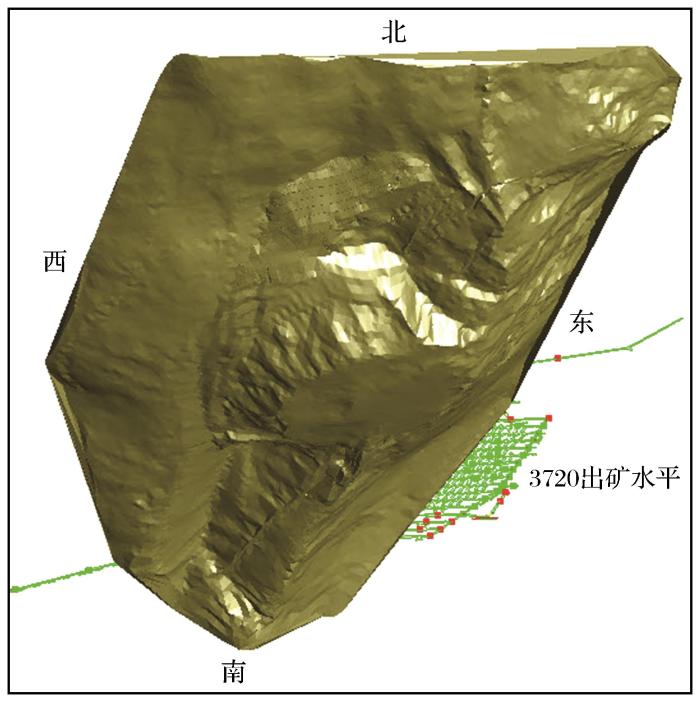
图10
地表塌陷区和3720出矿水平复合图
Fig.10
Composite map of surface subsidence area and 3720 ore removal horizontal
图11
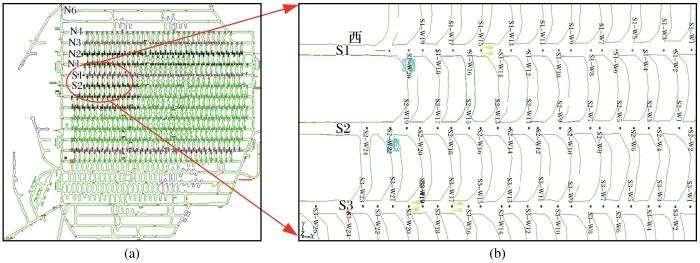
图11
3720出矿水平布置图(a)和局部放大图(b)
Fig.11
Horizontal layout diagram(a) and localized enlargement diagram(b) of 3720 ore removal
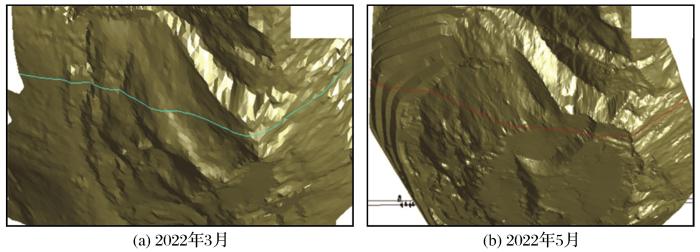
在普朗铜矿地表塌陷区三维模型的基础上,求取不同时期各穿脉纵剖面上的塌陷曲线,并进行塌陷规律分析。2022年3月至2023年3月,该矿山放矿生产集中在S10至N4已完成拉底的区域,塌陷坑分布范围南至S8,北至N2,因此选取S1、S8和N2剖面进行塌陷规律分析。S1穿脉剖面塌陷曲线如图12(a)所示,可见从2022年3月至2022年5月,S1-E30剖面上方塌陷坑消失,主要是由于地表治理,使得北部和西部边坡冰碛物被填入塌陷坑;2022年3月至2022年12月,S1-E30以东塌陷区的S1剖面上方地表逐渐下沉,累计下沉约6 m,但进入2023年该区域却逐渐抬升,在2022年底的基础上,2023年前3个月累计抬升约8 m;总体上,2022年3月28日至2023年3月22日, S1剖面上方地表线整体下降,但塌陷坑变得平整;近一年时间,从S1-E30往西,直到S1-W21西边100 m的范围,S1剖面上方地表线整体平均下降约20 m。S8穿脉剖面塌陷曲线如图12(b)所示,可见从2022年3月至2023年3月,S8剖面塌陷主要发生在从S8-18至S8-W25以西30 m的范围,该范围内地表平均下降约12 m;S8-18剖面上方逐渐形成凹坑,是由于井下放矿和地表排水沟施工所致;S8剖面上方地表的下沉速度小于S1剖面上方,其原因是井下S8穿脉放矿量比S1穿脉放矿量少。N2穿脉剖面塌陷曲线如图12(c)所示,可见2022年3月至2023年3月,N2剖面塌陷主要发生在N2-E37至N2-W225以西60 m的范围,该范围内地表整体下降约13 m;2022年3月N2-E35至N2-E15之间地表存在较深沟壑,如图13(a)所示,主要是因为井下放矿生产诱发地表西北部边坡滑动,致使大量地表冰碛物滑入坑内;2022年4月经过地表逐步治理,该沟壑逐渐变浅,至2022年5月形成台阶,如图13(b)所示。
图12

图13
放矿生产是放矿计划的执行,因此地表沉陷控制考虑放矿计划,将放矿计划与地表施工相结合。
3.3 塌陷规律分析
从航测三维模型和数据分析可知,普朗铜矿地表受影响区域位于首采区放矿点上方,塌陷坑位于受影响区域中心,塌陷坑中心位于S1和S2穿脉上方,以S1和S2为中心往南、北2个方向,上方地表塌陷程度逐渐减弱。在同一穿脉上穿脉中间区域上方地表塌陷较大,穿脉东西边缘上方地表沉陷较小。由第3.1小节可知,测区塌陷范围逐渐向西北和东南方向延伸,其延伸方向与新增的活动放矿点一致。以2023年3月22日为例,活动放矿点与塌陷范围线之间有一定的距离(2~3 m),因此可通过选择不同位置放矿点进行放矿,进而有效控制塌陷范围。由第3.2小节可知,地表塌陷程度与放矿量呈正相关关系,而与回填量呈负相关关系。这是因为地表塌陷是井下放矿诱发的矿岩崩落与移动直接导致的。
根据随机介质理论和概率积分法,得到地表任意点下沉量公式(林芳等,2023),可表示为
式中:
图14
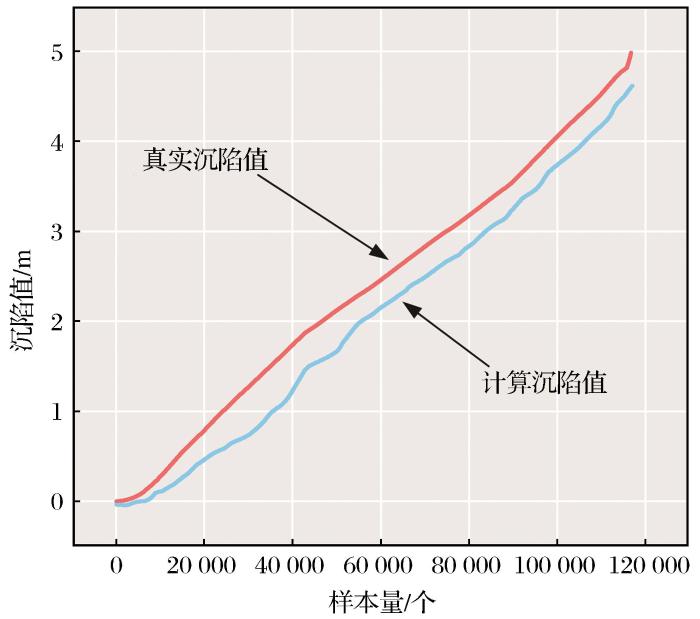
图14
真实沉陷值与计算沉陷值对比
Fig.14
Comparison of real settlement value and calculated settlement value
图15
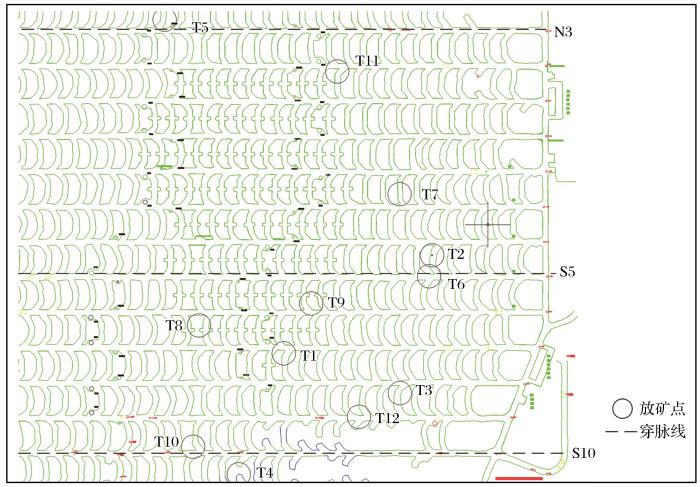
图15
普朗铜矿西北部塌陷范围及放矿点分布
Fig.15
Subsidence range and ore removal point distribution in the northwest of Pulang copper mine
表2 普朗铜矿地表塌陷量精度评定
Table 2
| 测点编号 | 计算沉陷值/m | 真实沉陷值/m | 误差值/m |
|---|---|---|---|
| T1 | 2.694 | 2.872 | 0.178 |
| T2 | 1.660 | 1.711 | 0.051 |
| T3 | 0.584 | 0.615 | 0.031 |
| T4 | 0.213 | 0.244 | 0.031 |
| T5 | 1.530 | 1.593 | 0.063 |
| T6 | 1.529 | 1.670 | 0.141 |
| T7 | 3.133 | 3.230 | 0.097 |
| T8 | 3.274 | 3.346 | 0.072 |
| T9 | 3.273 | 3.322 | 0.049 |
| T10 | 0.720 | 0.767 | 0.047 |
| T11 | 4.986 | 5.132 | 0.146 |
| T12 | 0.889 | 0.930 | 0.041 |
4 结语
将无人机航测用于普朗铜矿自然崩落法开采地表塌陷分析,得出如下结论:
(1)普朗铜矿地表受影响区域位于首采区放矿点上方,塌陷坑位于受影响区域中心,地表受影响范围向西北和东南延伸,塌陷坑范围随着放矿生产而不断扩大。
(2)根据塌陷范围和矿体穿脉剖面分析,以及概率积分法地表塌陷预测,可知活动塌陷范围与活动放矿点分布有关。
(3)基于概率积分法预测沉陷值,对比普朗铜矿地表计算沉陷值与真实沉陷量,最大误差不超过0.18 m。
综合三维建模和地表塌陷规律,建议雨季有必要在塌陷区南部开凿引水渠;在地表治理和出矿品位控制方面,需要综合考虑放矿计划和地表施工。此外,本文预测沉陷值均小于实测沉陷值,如何缩小地表沉陷预测值和实测值的误差,可作为后续研究内容。
http://www.goldsci.ac.cn/article/2024/1005-2518/1005-2518-2024-32-4-654.shtml
参考文献
Monitoring large-area mining subsidence by GNSS based on IGS stations
[J].
Study on the Influence Mechanism and Prevention Measures of Stress Concentration on Surrounding Rock Stability in Block Caving Undercutting
[D].
Accuracy verification and correction of D-InSAR and SBAS-InSAR in monitoring mining surface subsidence
[J].
Hazard evaluation of the slope in Shenzhen based on airborne LiDAR data
[J].
Influence of landmarks on the foundation pit monitoring by digital close-range photogrammetry
[J].
Application and accuracy analysis of Sirius UAV aerial photography system in complex topographic survey
[J].
Study on surface displacement law of a mine in Jining based on probability integral method
[J].
The application of pyramid image structure in image match
[J].
Application of UAV image matching point cloud in the monitoring of illegal land and illegal construction
[J].
Present situation of block caving mining technology at home and abroad
[J].
Study on mechanism of surface collapse and ground deformation in western mined area of Chengchao iron mine
[J].
Discussion on the application of block caving mining method
[J].
Empirical investigation and characterization of surface subsidence related to block cave mining
[J].
Research and practice of high and steep slope deformation measurement accuracy based on measuring robot
[J].
Research on refraction correction of automatic dam deformation by measuring monitoring with robotic total station
[J].
Application of measuring robot in surface dynamic deformation monitoring of mining
[J].
UAV aerial triangulation:Point error distributions and the influencing mechanisms of ground control points on its accuracy
[J].
GPS-supported bundle adjustment method of UAV by considering exposure delay
[J].
Identification of ground subsidence in goaf of Hancheng mining area based on PS-InSAR and DS-InSAR
[J].
3D urban modeling technology based on oblique image and airborne LiDAR
[J].
An accurate digital subsidence model for deformation detection of coal mining areas using a UAV-based LiDAR
[J].
Research on Key Technologies of Integration System of Block Caving Ore Drawing Optimization Control and Intelligent Management
[D].
Research and application overview of block caving method
[J].
自然崩落法拉底应力集中对围岩稳定性影响机理及防治措施研究
[D].
利用机载LiDAR的深圳斜坡类地质灾害危险性评价
[J].
标志点对数字近景摄影基坑监测精度影响研究
[J].
天狼星无人机航摄系统在复杂地形测量中的应用与精度分析
[J].
基于概率积分法的济宁某矿地表位移规律研究
[J].
金字塔影像结构在影像匹配中的应用
[J].
无人机影像密集匹配点云在违法占地和违法建筑监测中的应用
[J].
国内外自然崩落采矿法技术现状
[J].
程潮铁矿西区采空区地表塌陷机制与变形规律初探
[J].
自然崩落采矿法技术应用探讨
[J].
基于测量机器人的高陡边坡变形测量精度研究与实践
[J].
测量机器人大坝变形自动化监测中的大气折光修正研究
[J].
测量机器人在矿区地表动态变形监测中的应用
[J].
无人机航测空三点误差分布及像控点对其精度影响机理
[J].
顾及曝光延迟的无人机GPS辅助光束法平差方法
[J].
结合PS-InSAR和DS-InSAR的韩城矿区采空区地面塌陷识别
[J].
倾斜影像和机载LiDAR融合的城市三维建模技术
[J].
自然崩落法放矿优化控制与智能化管理关键技术研究
[D].
自然崩落采矿法研究及应用
[J].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}