


三维激光扫描技术已被应用于露天高陡边坡监测(董秀军等,2006)、危岩体监测(黄江,2014)、采空区安全隐患识别(李杰林等,2022)、水电站岩体结构监测(娄国川等,2008)和隧道岩体监测(师海,2013)等方面,具有广阔的应用前景与价值。在国内,基于三维激光扫描识别结构面技术作为不断变革的技术。最先是通过一套结合人工选取与计算机辅助颜色识别的方法及编写程序,实现了岩体结构面自动识别(施星波,2010)。后来三维激光扫描点云重构模型,利用模糊C平均群聚方法对其产状进行聚类,运用不同的颜色表示结构面的聚类结果,再结合三维激光测量进行岩体结构面的半自动快速统计方法(刘昌军等,2011a,2011b),并在三维激光扫描仪获取点云数据的基础上,研究了一套方法来提取相应的参数(朱云福,2012);同时,基于激光扫描技术与离散元模拟方法可以模拟并分析岩体结构特征的高速远程滑坡演化过程及其致灾范围(葛云峰等,2016)。在国外,基于三维激光扫描识别结构面技术处于不断革新中,主要历程如下:首先是将点云进行三角网化,计算单个三角网的产状,并通过模糊群聚的方法实现结构面自动识别(Slob et al.,2005),然后对结构面点云赋予倾向与倾角的颜色,通过颜色对结构面进行识别(Jaboyedoff,2007),后来通过搜索平面位置,并将平面面片进行合并(Gigli et al.,2011),并基于K最近邻分类与核密度估计算法,开展了岩体结构面智能识别研究(Riquelme et al.,2014)。由此可知,基于三维激光扫描识别结构面技术在发展过程中,逐步表现出了快速、高效、高精度获取结构信息的优势,是一种非常适用于获取岩体结构信息的方式(荆洪迪等,2015;李杰林等,2021)。
近年来,三维激光扫描技术已成为岩体结构面数据采集的一种新手段(张新磊,2009)。为了解决多尺度获取深部岩体结构面信息的相关问题,本文将三维激光扫描技术应用于深部巷道工程,考虑了点云控制点坐标已知和未知的情况,获得了高精度结构面点云图,提取了结构面产状和间距等信息,为探究围岩与支护系统破坏形式提供了数据支持。
1 深部巷道三维表面模型构建与结构面提取技术
1.1 环境调研与测站选取
开展巷道环境调研工作时,需要对掌子面碎石进行清理,清理完成后等待掌子面位置的粉尘单位产尘量小于100 g/t时进行拍摄,以便获取结构面实时数据。在拍摄过程中,既要避免被测岩面碎渣、灰尘残留,减少残留物对点云数据的影响,也要确定无车辆干扰和通风管线的干扰,保证被测面噪声、孔洞占比小。
通过现场观测,测站设定的位置距离被测岩面正前方6 m,距离两侧边墙至少2 m,高度一般选取1.2 m。关于点云数据的坐标变换,控制点需选择处于被测面一侧的3个点,且3个点的位置不在一条直线上。为了减小激光角度误差的影响,需要对测站处的三脚架进行固定,确保扫描仪转动时的震动影响最小,并考虑扫描仪镜面的平面角误差和扫描电机的非均匀转动控制误差等因素,对扫描仪本身进行调试。隧洞中存在的废石遮挡、顶板裂隙水滴落、光照角度、支护设施和隧洞工作人员来回走动等情况均会影响结构面数据的采集工作,为了最优程度地获取点云数据,需要尽可能避免以上情况的发生。
1.2 现场三维激光扫描测试
设置扫描仪的测试精度时,将其分辨率调为6.3 mm,图像像素大小为2.2 µm。具体的测试步骤包括:建立文件夹;进行设站处理;调整精度参数;扫描结构面;在扫描仪界面中找到3个控制点的位置并设置标靶高程,利用储存卡存储数据。
1.3 巷道点云模型构建与数据处理
将点云数据传输至电脑,分为2种情况。一种是控制点坐标未知,在Cyclone软件中打开设站扫描获取的点云数据,并对整个点云数据进行截取目标结构面点云,手动去噪以便减少遮蔽物对点云数据的影响,利用Cloud Compare软件实现三角网格的拼接与平滑网格,得到一个目标的实体模型。另一种是控制点坐标已知,导入点云数据时,将点云数据的坐标转换为实际矿井坐标,再对整个点云数据进行截取目标结构面点云,手动去噪以便减少遮蔽物对点云数据的影响,并利用Cloud Compare软件实现三角网格的拼接与平滑网格,得到一个目标的实体模型。
1.4 结构面识别与几何参数提取
(1)通过聚类识别。根据指定的种子点获取其邻近点并认为它们是一类,重复上述步骤,将邻近点作为新种子点,直至找不到邻近点,结束进程,提取出类别目标。
(2)通过迹线识别。迹线识别是利用软件中最小成本路径算法沿着裂缝的起点与终点之间的曲面“跟踪”这些交叉轨迹,然后计算最佳拟合平面以估计方向。
(3)产状与间距计算。产状计算是通过迹线识别后,由交叉轨迹,计算出最佳拟合平面,直接提取倾向和倾角。在3个控制点未知的情况下,提取出的倾向与实际测得的倾向有一定的偏差,需要加上偏差值,最后得出的结果才是真实产状。在3个控制点已知的情况下,点云坐标经过矩阵变换得出真实坐标,再对点云进行处理,测得的产状为实际产状。通过测量相邻结构面法线方向之间的距离,直接测得结构面之间的间距。
(4)结构面组划分。将提取出来的结构面组输入dips软件中,生成赤平投影图,划分出其优势结构面组,最后在图中把结构面组划分出来。
(5)数据校核与误差分析。在现场测取结构面产状时,需要测取至少3组产状信息和一组间距信息。关于数据校核,即利用最小二乘算法计算产状,利用近似平行结构面组间距算法计算间距,将实测结构面产状与提取出来的结构面信息做差比较,倾向误差控制在
采用最小二乘法计算结构面产状,即利用点云数据提取每个结构面上不在一条直线上的3个点,具体算法如下:
已知在三维空间中一平面可用如下方程表示:
假设结构面上的点用(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3),…,(Xn,Yn,Zn )表示,则可以采取线性回归法来求解空间中的平面方程的参数E、F和M:
可将上式改写为矩阵形式,公式如下:
若行列式计算结果为0,则该平面垂直或平行于坐标轴;若行列式的计算结果不为0,则依据克拉默法则求解出空间平面方程的系数。根据所计算出的平面方程即可得到平面的法向量(E,F,M),然后根据图1中法向量与产状的空间位置关系求解出倾向和倾角。
图1
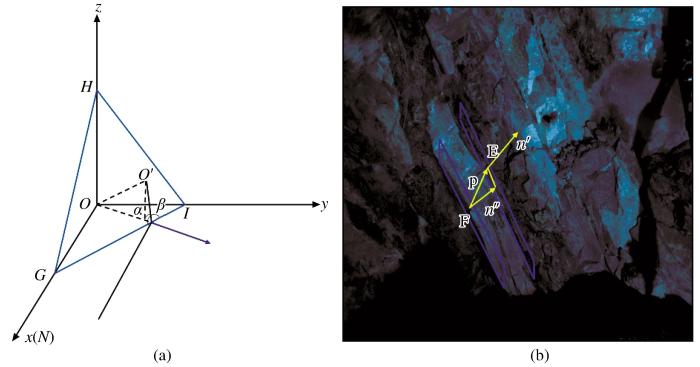
图1
结构面倾向倾角示意图(a)和近似平行结构面示意图(b)
Fig.1
Schematic diagram of dip angle of structural plane(a) and approximate parallel structural plane(b)
当M>0时,有:
当M<0时,有:
根据三维重构得到的三维点云模型,可划分出几组结构面,在同一组结构面内,相邻的2个结构面通常不平行。为了更好地统计结构面间距,提出了一种算法,如图1所示。即:
平面GHI的倾角
则间距为
结构面提取的具体操作流程如图2所示。
图2
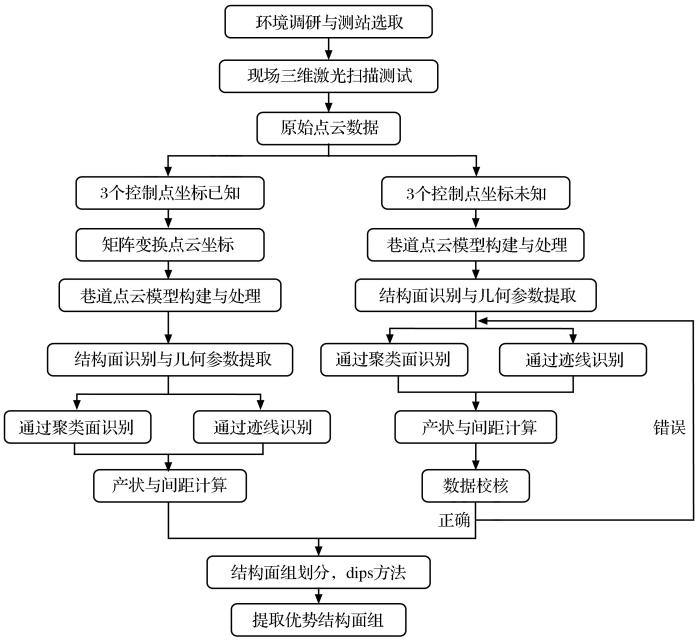
图2
深部巷道三维表面模型构建与结构面提取技术
Fig.2
3D surface model construction and structural plane extraction technology of deep roadway
2 案例研究
2.1 工程背景
金川镍矿是目前我国最大的硫化铜镍矿床,也是世界上罕见的多金属共生的大型硫化铜镍矿床之一,已探明矿石储量为5.6亿t,镍金属储量为602万t,位列世界同类矿床第3位;铜金属储量为389万t,居我国同类矿床第2位。金川二矿区进入深部开采以来,井巷工程围岩和采场矿岩表现出典型的高应力诱发变形破坏行为。
+650 m水平卸载站硐室工程布设在金川二矿区深部混合岩地层内,以往研究对深部混合岩地层分布规律、结构面发育特征和岩体结构类型缺乏系统认识,前期有效的数据信息十分匮乏。为此,通过搜集+650 m水平范围内混合岩地层分布特征、岩性发育规律、结构面发育条件和岩体结构特征等重要信息,为更加深入认知破碎站工程区岩体结构特征,建立围岩地质力学模型以实现定量表征岩体结构特征和地层结构提供依据。+650 m水平溜井硐室的结构面主要发育条件如图3所示,由于较小尺寸结构面对岩体的影响较小,因此本文只考虑所识别线段长度超过0.25 m的迹线,因此图中所识别结构面也是根据0.25 m以上的迹线产生。结构面的发育条件对结构面稳定性具有控制作用,结构面几何参数信息是确定深部岩体结构的基础,是深入分析变形规律和破坏机制的关键信息。由于结构面发育特征复杂,岩体切割破碎,以及结构面密集发育等特征,传统地质罗盘测量已无法满足信息获取的需求,采用三维激光扫描仪获取结构面点云数据,可以高效提取出结构面的几何参数。
图3
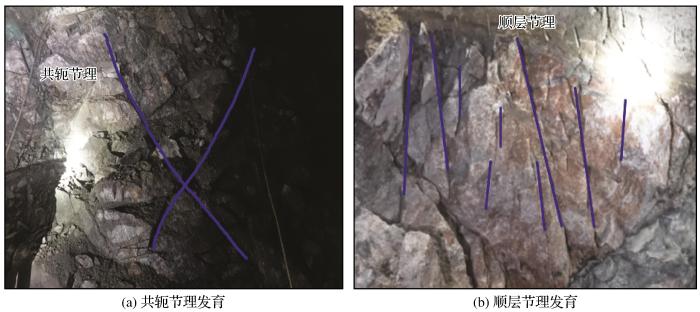
图3
650 m水平溜井硐室的结构面主要发育条件
Fig.3
Main development conditions of structural plane of +650 m level chute chamber
2.2 现场扫描与数据处理
(1)现场三维激光扫描。现场扫描所用的设备是由徕卡公司提供的Leica ScanStation P30高精度扫描仪,该系统包含硬件处理部分和配套数据处理软件,硬件部分包含扫描仪主机、电池、电池充电器、三脚架和主机箱等(图4)。
图4
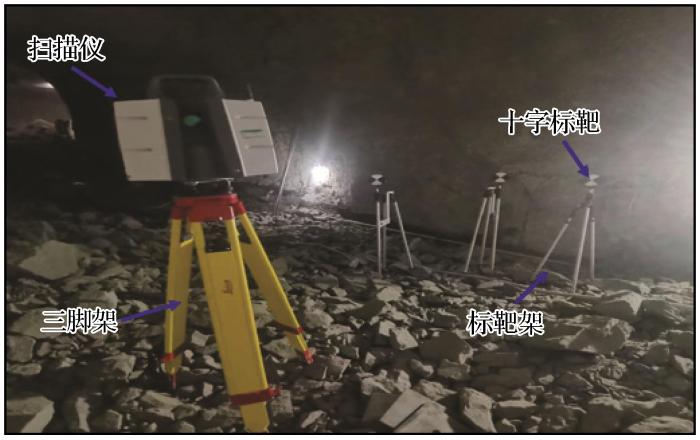
图5

图6
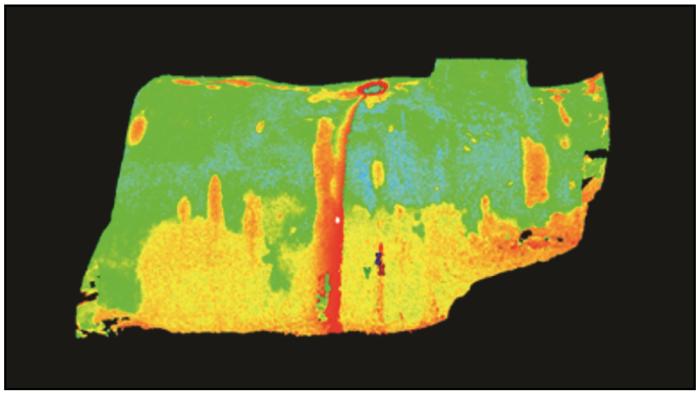
图6
扫描得到的+650 m水平巷道整体图
Fig.6
Overall diagram of +650 m level roadway obtained after scanning
图7
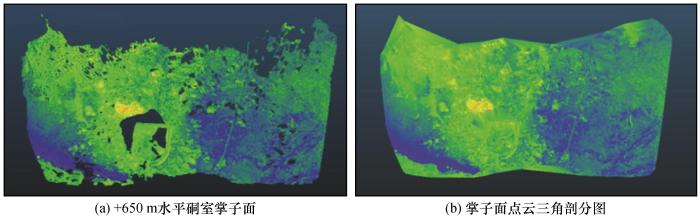
图7
650 m水平溜井硐室掌子面及其点云三角剖分图
Fig.7
Working face and point cloud triangulation of +650 m level chute chamber
图8
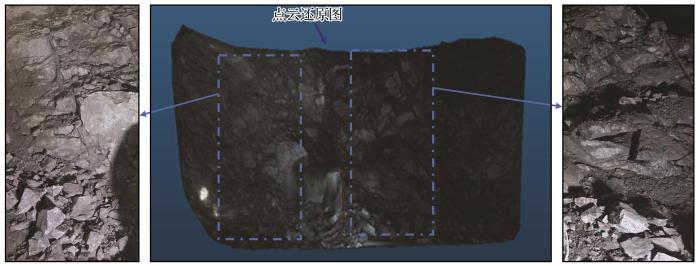
图8
650 m水平溜井硐室掌子面还原图与相应现场图
Fig.8
Restoration and corresponding field diagram of working face of +650 m level chute chamber
2.3 隧洞岩体结构面几何参数统计
图9
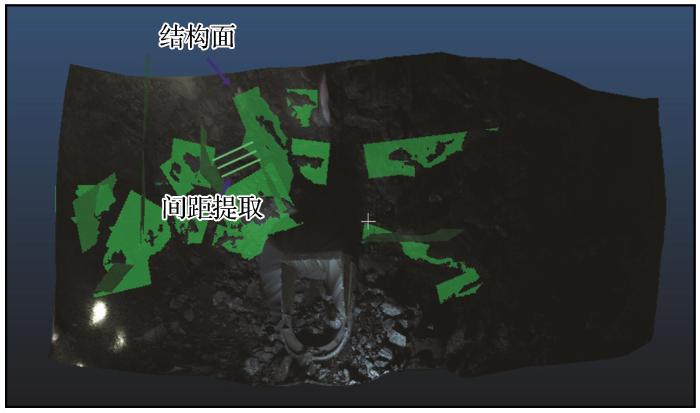
图10
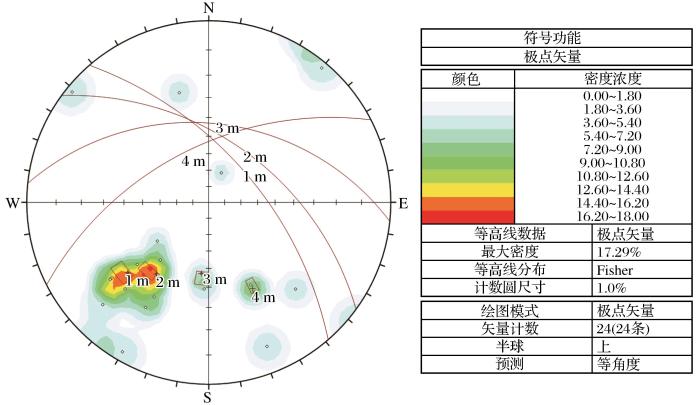
图10
650 m水平卸载站硐室掌子面赤平投影图
Fig.10
Stereographic projection of +650 m level unloading station chamber face
表1 +650 m水平卸载站硐室工程区混合岩地层发育的优势结构面组汇总
Table 1
| 岩组名称 | 主要岩性 | 中段 水平/m | 岩体结构类型 | 间距提取/m | 优势结构组产状(倾向∠倾角) | ||
|---|---|---|---|---|---|---|---|
| 第1组 | 第2组 | 第3组 | |||||
| 混合岩带 | 花岗岩、角闪岩、大理岩 | +650 | 层状、层状—碎裂 | 0.61 | 222°∠61° | 184°∠47° | 153°∠60° |
图11
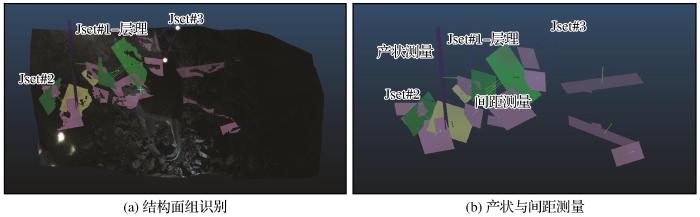
图11
650 m水平卸载站硐室掌子面结构面识别
Fig.11
Structural plane identification of +650 m level unloading station chamber face
表2 +650 m水平卸载站硐室工程区混合岩地层发育的优势结构面组地质测量与利用校核算法计算产状和间距汇总
Table 2
| 岩组名称 | 主要岩性 | 岩体结构类型 | 间距测量/m | 优势结构组产状(倾向∠倾角) | 近似平行结构面组间距/m | 利用最小二乘法计算产状(倾向∠倾角) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 第1组 | 第2组 | 第3组 | 第1组 | 第2组 | 第3组 | |||||
| 混合岩带 | 花岗岩、角闪岩、大理岩 | 层状、层状—碎裂 | 0.58 | 220°∠67° | 180°∠45° | 158°∠66° | 0.62 | 217°∠67° | 182°∠44° | 151°∠65° |
表3 +650 m水平卸载站硐室工程区混合岩地层发育的优势结构面组提取与地测结果差值及利用校核算法计算产状差值比较
Table 3
| 岩组名称 | 主要岩性 | 岩体结构类型 | 提取间距与地测间距差值/m | 优势结构面组提取与地测结果差值 | 提取间距与校核算法间距差值/m | 优势结构面组提取与利用校核算法计算产状差值 | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 第1组 | 第2组 | 第1组 | 第1组 | 第2组 | 第3组 | |||||
| 混合岩带 | 花岗岩、角闪岩、大理岩 | 层状、层 状—碎裂 | 0.03 | 倾向之差2°,倾角之差6° | 倾向之差4°,倾角之差2° | 倾向之差5°,倾角之差6° | 0.01 | 倾向之差5°,倾角之差6° | 倾向之差2°,倾角之差3° | 倾向之差2°,倾角之差5° |
3 结论
本文通过引入高精度三维扫描仪,对需要监测的结构面进行扫描,根据扫描结果分析其结构破坏的影响因素,即产生围岩与支护系统破坏形式的根本原因在于+650 m水平卸载站硐室工程地质条件的特殊性与复杂性。
(1)通过对高精度获取的扫描数据进行快速处理,在控制点已知和未知的情况下,均可获取结构面的产状信息,降低了人员获取结构面信息的危险性,说明该方法是一种非常适用于获取深部巷道岩体结构面信息的技术。
(2)利用最小二乘法计算产状,利用近似平行结构面组间距算法计算间距,将实测结构面产状与提取出来的结构面信息做差比较,可知倾向和倾角误差均控制在
(3)在金川二矿区+650 m卸载站硐室掌子面结构面产状等信息提取中应用了本文方法,有效识别了结构面产状信息,识别过程简便,精确度高。
http://www.goldsci.ac.cn/article/2023/1005-2518/1005-2518-2023-31-2-313.shtml
参考文献
Application of three-dimensional laser scanning technology in obtaining geometric parameters of rock mass discontinuities
[J].
Application of three-dimensional laser scanning technology in geological survey of high and steep slopes
[J].
Study on roughness anisotropy,size effect and spacing effect of natural rock mass discontinuities
[J].
Intelligent ide-ntification and information extraction of rock mass discontinuity based on 3D laser scanning technology
[J].
Semi-automatic extraction of rock mass structural data from high resolution LIDAR point clouds
[J].
Discussion on the method of determining the spacing of structural planes in the study of rock mass structure
[J].
Informatization Research on the Stability of Dangerous Rock Based on 3D Laser Scanning Technology
[D].
New insight techniques to analyze rock-slope relief using DEM and 3D-imaging cloud points:COLTOP-3D software
[J].
Extraction of rock mass discontinuity information based on three-dimensional laser scanning
[J].
Numerical analysis of stability of large complex goaf group and prediction of hidden danger area
[J].
Application of 3D laser scanning technology to identification of rock mass structural plane in roadway of underground mine
[J].
Automatic fuzzy clustering analysis and geometric information acquisition of rock mass discontinuities based on laser point cloud data
[J].
Semi automatic statistical study of rock mass structural planes using laser scanning technology
[J].
Investigation on rock mass structure of high slope based on 3D laser scanning technology
[J].
New approach for semi-automatic rock mass joints recognition from 3D point clouds
[J].
Research on the Application of Three-dimensional Laser Scanning Technology in the Monitoring of Construction Tunnels
[D].
Research on Occurrence Recognition Method of Rock Mass Discontinuity Based on 3D Laser Scanning Da-ta
[D].
Method for automated discontinuity analysis of rock slopes with three-dimensional laser scanning
[J].
Stability analysis of accumulation layer landslide under heavy rainfall
[J].
Research on geometric information acquisition of rock mass discontinuities based on VirtuoZo
[J].
Laser scanning tunnel deformation and rock mass structural plane testing technology and application
[J].
Research on Identification Method of Rock Mass Structural Plane Based on TLS Technology
[D].
Based on Ground 3D Laser Scanning System of Scene Reconstruction and Related Applications
[D].
Research on Rock Mass Discontinuity Identification Method Based on 3D Laser Scanning Data and System Development
[D].
三维激光扫描技术在岩体结构面几何参数获取中的应用
[J].
三维激光扫描技术在高陡边坡地质调查中的应用
[J].
天然岩体结构面粗糙度各向异性、尺寸效应、间距效应研究
[J].
基于三维激光扫描技术的岩体结构面智能识别与信息提取
[J].
岩体结构研究中结构面间距取值方法探讨
[J].
基于三维激光扫描技术的危岩稳定性信息化研究
[D].
基于三维激光扫描的岩体结构面信息提取
[J].
大型复杂采空区群的稳定性分析及隐患区域预测
[J].
三维激光扫描技术在地下巷道岩体结构面识别的应用
[J].
基于激光点云数据的岩体结构面全自动模糊群聚分析及几何信息获取
[J].
应用激光扫描技术进行岩体结构面的半自动统计研究
[J].
基于三维激光扫描技术的高边坡岩体结构调查
[J].
三维激光扫描技术在施工隧道监测中的应用研究
[D].
基于三维激光扫描数据的岩体结构面产状识别方法研究
[D].
强降雨作用下堆积层滑坡稳定性分析
[J].
基于VirtuoZo的岩体结构面几何信息获取研究
[J].
激光扫描隧洞变形与岩体结构面测试技术及应用
[J].
基于TLS技术的岩体结构面识别方法研究
[D].
基于地面型三维激光扫描系统的场景重建及相关应用
[D].
基于三维激光扫描数据的岩体结构面识别方法研究及系统研制
[D].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}