


井下铲运机的工作环境存在粉尘大、噪音多和通风差等问题[1],而且随着地下矿山开采深度逐渐增加,井下高温、高地压和高岩溶水压的“三高”问题也将更加严重。这些因素对铲运机操作人员的身体健康、生命安全及工作效率都有很大影响,所以研究井下铲运机的自主导航具有重要意义。
本文提出了一种基于二维单线激光雷达扫描信息和随机抽样一致性的井下巷道边线检测方法,通过考虑矿山井下巷道环境的特点及复杂性,提高算法在多种类型巷道环境下的稳健性和准确度。文中阐述了该方法的数学原理及算法实现流程,并通过6组激光模拟数据对算法的效果进行了验证及分析。
1 基于RANSAC的巷道边线提取
1.1 随机抽样一致算法原理
随机抽样一致算法(RANSAC,Random Sample Consensus)最早由Fischler等[11]于1981年提出,主要用来处理包含异常数据、噪声和离群数据的观测数据,通过迭代的思想求解最优数学模型。随机性和假设性是RANSAC算法的核心。其中,随机性是对所有数据进行随机抽样,结合抽中正确数据的概率,基于大数定律得到近似的正确结果;假设性是假设每一次随机抽取的抽样数据是正确的,并由抽取的数据确定模型参数,然后将该模型应用于其他数据,根据符合该模型的数据量判断结果的好坏。RANSAC算法广泛应用于数学和计算机视觉等领域,除了基础的RANSAC算法,还有很多优化版本,可以解决直线拟合、平面拟合、点云或图像匹配及帧间变换矩阵计算等问题[17]。
RANSAC算法的数学推导过程如下:
首先,假设数据集中内点占所有数据的比例为t,有
式中:
然后,假设用RANSAC算法求解的数学模型需要的点数为n。n的值由求解的问题确定,如求解直线模型时n为2,求解平面模型时n为3。则用RANSAC算法解得正确模型的概率P为
式中:k为迭代次数,表示每次随机选取n个点进行解算,重复k次;
由于内点所占比例t是一个先验值,且是未知数,所以通常先赋给t一个经验值。根据式(2),可得t和迭代次数k共同影响RANSAC算法求得正确模型的概率,如果赋给t的经验值与真实值偏差过大,可以通过调整迭代次数来保证算法的准确度P,迭代次数k由以下公式得出:
式中:P为算法的目标准确度;k为迭代次数;t为内点占比。
1.2 基于RANSAC的巷道边线提取流程
基于RANSAC的巷道边线提取流程如图1所示。首先使用二维单线激光雷达收集激光点云数据,并计算每个激光点的曲率,在曲率超过阈值的点处,将激光点云划分为前、后2个区域;然后运用RANSAC算法从各个区域中提取巷道边线,并且根据铲运机航向角和巷道设计标准对生成的直线进行筛选;最后合并筛选过后的激光数据,再次应用RANSAC算法,生成最终的巷道边线,并从平行度等方面计算巷道边线可靠度。
图1
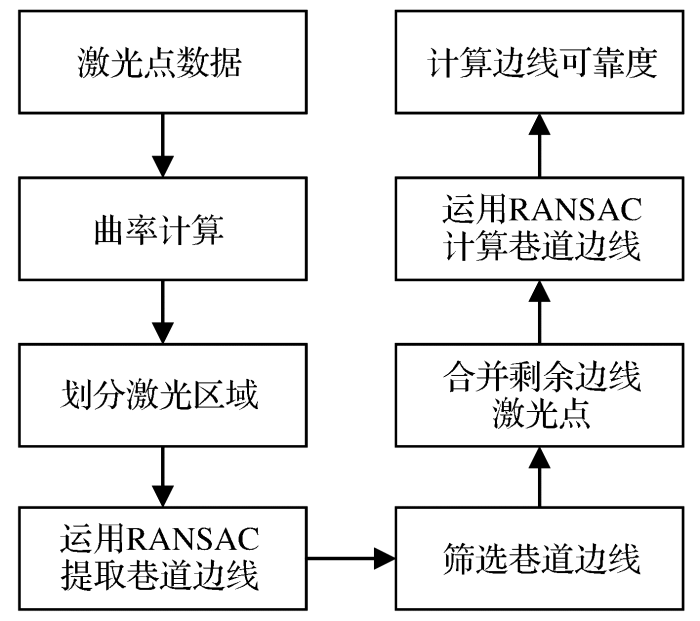
步骤1:计算激光点曲率
公式如下:
式中:k为激光雷达的第k扫描帧;X为激光点坐标的集合;S为由i点及其前后等量若干j点组成的点集;c值为i点的曲率大小[18]。本文中点集S共包含11个点,即在i点左右各取5个j点。
步骤2:根据激光点曲率划分不同的区域
在曲率出现突然变化的点处,将该点前后的激光点划分为2个部分。
步骤3:运用RANSAC提取不同区域的直线
应用RANSAC算法,从每一部分激光点提取巷道边线,并存储每个巷道边线的斜率和截距。
步骤4:根据铲运机运动方向和巷道设计标准筛选巷道边线
巷道边线筛选原则如下:
(1)巷道边线应该以铲运机为中点,分成左右2个部分。
(2)为保证铲运机的安全,铲运机运动方向与巷道走向夹角始终不超过50°。
(3)巷道边线原则上是两两平行的,但是由于实际建设或数据收集过程存在误差,相交角度应该在一定范围内(本文设置相交角度范围为小于20°),则有
式中:
(4)巷道宽度范围应满足矿山巷道设计要求,本文设置为约2.2 m。
步骤5:合并筛选剩余的巷道边线激光点,并再次运用RANSAC算法进行最终巷道边线提取,同时计算巷道边线可靠度。
根据上述规则对巷道边线进行筛选后,可能还存在多条巷道边线。将这些巷道边线包含的激光点合并为巷道左右2个部分,运用RANSAC算法提取出最终的巷道边线,然后计算提取边线的可靠度。计算方法如下[15]:
式中:
2 实例验证
2.1 数据准备
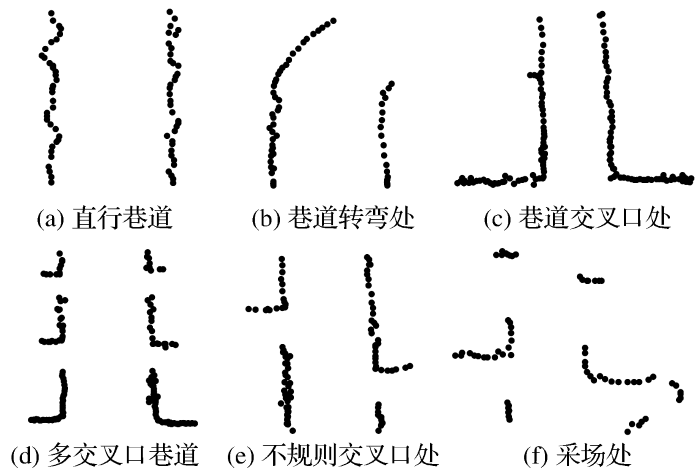
算法数据基于二维单线激光雷达。单线激光雷达与多线束激光雷达相比,具有体积小、测量速度快、数据量少和成本较低的优点,因此更加适用于巷道边线的检测。为了测试本文所提算法的准确度和稳健性,共准备了6组激光点云模拟数据,分别代表地下矿山井下巷道中6种典型的场景,其中既有对应相对简单情景的数据,也有对应相对复杂情景的数据,所以试验结果具有很好的代表性。
6组激光点云数据是在铲运机航向角与巷道真实走向完全一致的假设条件下模拟得出(航向角与x轴夹角为90°,模拟的巷道真实走向与x轴夹角也为90°)。本文的研究重点是如何在井下根据二维激光扫描信息提取巷道边线,所以文中数据是指经过去除运动畸变等处理的激光点数据,不需要考虑铲运机运动速度等因素的影响。
6组数据如图2所示。根据巷道类型可分为3类:数据集(a)和(b)分别是没有交叉口的直行运输巷道和部分弯曲的运输巷道,这是井下环境最简单的场景;数据集(c)、(d)和(e)分别对应有各类交叉口的巷道,情景相对复杂,其中数据集(c)是巷道岔口处,(d)、(e)是多交叉口及不规则交叉口处的巷道,岔口密集,巷道两帮被岔口分为多段短壁,由于短壁之间空隙较多,激光扫描信息反馈缺失严重;数据集(f)是采掘工作面附近的巷道场景,有很多不规则的几何结构,必须结合巷道设计准则和铲运机的航向角等信息才能提取出巷道边线。
图2
2.2 试验结果及分析
图3
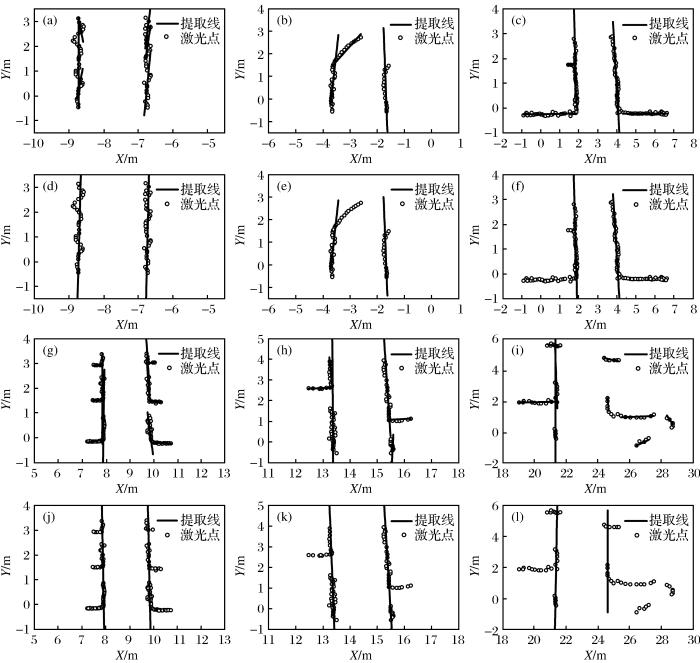
图3
巷道边线提取效果图
(a)直行巷道分段;(b)转弯处分段;(c)交叉口处分段;(d)直行巷道最终结果;(e)转弯处最终结果;(f)交叉口处最终结果;(g)多交叉口巷道分段;(h)不规则交叉口处分段;(i)采场处分段;(j)多交叉口巷道最终结果;(k)不规则交叉口处最终结果;(l)采场处最终结果
Fig.3
Effect map of roadway edge extraction
以图2中数据集(d)为例进行分析。该数据集显示的是井下常见的巷道交叉口场景,巷道两帮是多段短壁,通过计算激光点的曲率,巷道两帮的激光点云各被划分为6个区域,然后分别运用RANSAC算法进行直线提取共产生12条直线。根据铲运机的航向角和巷道的设计标准对直线进行筛选,当前铲运机的航向角
筛选过后,共剩余6条直线,巷道两帮各有3条。计算巷道两帮直线两两之间的距离和夹角,若某一直线与巷道另一边的所有直线夹角或距离都超出一定范围则剔除该直线,经筛选依然是6条直线。合并筛选后的6条直线,再次应用RANSAC算法提取出最终的巷道边线,如图3(h)所示。该巷道的2条边线倾角分别为89.5°和91.9°,平行度为97.33%,内点占比为94.90%,与航向角契合度为99.22%,经计算得到总体可靠度为97.15%,说明该巷道边线具有很高的可靠度(表1)。同时可视化结果显示,生成的巷道边线准确完整。如表1所示,根据式(6),从3个方面对算法提取巷道边线的效果进行分析:巷道左右两帮边线的平行度、巷道边线与铲运机航向角契合度、巷道边线内点占比,然后计算平均值,得到巷道边线的总体可靠度。表2记录了算法的解算时间。
表1 巷道边线可靠度分析
Table 1
| 数据集序号 | 平行度 | 与航向角契合度 | 内点占比 | 总体可靠度 |
|---|---|---|---|---|
| 平均值 | 97.45 | 98.34 | 96.16 | 97.32 |
| (a) | 99.43 | 99.23 | 94.50 | 97.72 |
| (b) | 93.01 | 97.78 | 100.00 | 96.93 |
| (c) | 97.72 | 96.74 | 95.31 | 96.59 |
| (d) | 97.33 | 99.22 | 94.90 | 97.15 |
| (e) | 98.71 | 97.79 | 92.25 | 96.25 |
| (f) | 98.51 | 99.31 | 100.00 | 99.27 |
表2 算法解算时间
Table 2
| 数据集序号 | 解算时间/ms |
|---|---|
| 平均值 | 72.51 |
| (a) | 68.46 |
| (b) | 53.74 |
| (c) | 76.74 |
| (d) | 89.47 |
| (e) | 64.51 |
| (f) | 82.12 |
通过分析试验结果得出:在6种场景下,提取的巷道边线平行度都在93%以上,巷道边线与航向角契合度都在96%以上,巷道边线内点占比都在92%以上,最终计算得到提取的巷道边线总体可靠度都在96%以上;同时生成的巷道边线经可视化显示后均符合井下巷道工程实际情况,没有异常;算法的平均解算时长为72.51 ms,最大值为89.47 ms,完全满足井下反应式导航的需求。以上结果说明本文所提方法能够有效准确地提取巷道边线,并且具有很高的实时性。
(2)算法稳健性评估。试验场景设计由简单到复杂,已经对算法的稳健性进行了一定程度的测试。为了更加深入地评估算法的稳健性,通过删除当前数据的1/2和2/3来模拟不同角度分辨率的激光数据,如果激光雷达原本角度分辨率是1°,经上述处理之后分别为2°和3°,这样就可以评估当使用更低数据速率(角度分辨率更大)的雷达或小功率处理器时算法的效果。
表3 由不同角度分辨率数据提取的巷道边线可靠度
Table 3
| 数据集序号 | 巷道边线可靠度/% | ||
|---|---|---|---|
| 1×角度 | 2×角度 | 3×角度 | |
| (a) | 97.72 | 97.77 | 96.39 |
| (b) | 96.93 | 92.50 | 93.05 |
| (c) | 96.59 | 97.37 | 95.74 |
| (d) | 97.15 | 99.14 | 97.11 |
| (e) | 96.25 | 95.17 | 96.06 |
| (f) | 99.27 | 91.23 | 93.85 |
在显著水平α=0.05的条件下,通过查阅F分布表得知F0.05(2,10)=4.10,F0.05(5,10)=3.33。由表4可知,数据角度分辨率的F值为1.579,不同井下场景的F值为1.088,很明显1.579<F0.05(2,10)=4.10,1.088<F0.05(5,10)=3.33,所以不同角度分辨率的激光雷达数据和不同井下场景对算法的效果并不会产生显著影响,说明算法本身具有很高的稳健性。
表4 试验数据方差分析
Table 4
| 方差来源 | 平方和 | 自由度 | 均方 | F值 |
|---|---|---|---|---|
| 总和 | 69.055 | 17 | ||
| 数据角度分辨率 | 11.723 | 2 | 5.862 | 1.579 |
| 不同井下场景 | 20.198 | 5 | 4.040 | 1.088 |
| 随机误差 | 37.134 | 10 | 3.713 |
3 结语
(1)针对多粉尘及巷道壁凹凸不平的井下封闭环境,提出了基于RANSAC的巷道边线检测算法,用于辅助井下铲运机的反应式导航,为实现井下铲运机的自主导航提供技术支撑。
(2)模拟了从简单到复杂的6种井下场景的激光数据,对算法进行验证,结果显示生成的巷道边线可靠度均在96%以上,解算时间均在0.1 s以下,证明算法具有较高的准确度和实时性,能为井下反应式导航提供准确的感知信息。
(3)稳健性分析试验结果表明:该算法在矿山复杂多变的环境和较大角度分辨率的激光数据下均能稳定有效地提取巷道边线,具有很高的稳健性。
参考文献
Modeling and Control of an Autonomous Underground Vehicle
[D].
地下铲运机自主导航研究现状及发展趋势
[J].
An overview of autonomous navigation techniques and development trend for underground LHD
[J].
基于双变量PID控制算法的地下智能铲运机自主导航技术研究
[J].
Technical study on autonomous navigation of smart underground scraper based on bivariate PID control algorithm
[J].
反应式导航在地下自主行驶铲运机中的应用
[J].
Reactive navigation for underground autonomous scraper
[J].
Reactive Navigation of an Autonomous Vehicle in Underground Mines
[D].
Mobile robot positioning:Sensors and techniques
[J].
基于模糊控制的井下自主铲运机的安全导航
[J].
Safe navigation of underground autonomous carry scraper based on fuzzy control
[J].
基于局部重建的点云特征点提取
[D].
Feature Detection on Point Clouds Via Local Reconstruction
[D].
基于MATLAB的最小二乘曲线拟合仿真研究
[J].
MATLAB simulation of curve fitting based on least-squares
[J].
Method and means for recognizing complex patterns
:U.S.,
A paradigm for model fitting with applications to image analysis and automated cartography
[J].
Laser based corridor detection for reactive navigation
[J].
一种基于平行坐标系的车道线检测算法
[J].
A lane detection method based on parallel coordinate system
[J].
基于Gabor滤波器的车道线快速检测方法
[J].
Lane line quick detection method based on Gabor filter
[J].
基于改进SIS算法和顺序RANSAC的车道线检测方法研究
[J].
Lane line detection method research based on improved algorithm of SIS and sequential RANSAC
[J].
基于神经网络与最小二乘法的车道线检测算法研究
[J].
A research on lane marking detection algorithm based on neural network and least squares method
[J].
基于RANSAC的点云数据特征提取
[D].
Feature Extraction of Point Cloud Data Based on RANSAC
[D].
Low-drift and real-time lidar odometry and mapping
[J].


 甘公网安备 62010202000672号
甘公网安备 62010202000672号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}